We’re about to enter a new age in robotics. Forget the servos, the microcontrollers, the H-bridges and the steppers. Start thinking in terms of optogenetically engineered myocytes, microfabricated gold endoskeletons, and hydrodynamically optimized elastomeric skins, because all of these have now come together in a tissue-engineered swimming robotic stingray that pushes the boundary between machine and life.
In a paper in Science, [Kevin Kit Parker] and his team at the fantastically named Wyss Institute for Biologically Inspired Engineering describe the achievement. It turns out that the batoid fishes like skates and rays have a pretty good handle on how to propel themselves in water with minimal musculoskeletal and neurological requirements, and so they’re great model organisms for a tissue engineered robot.
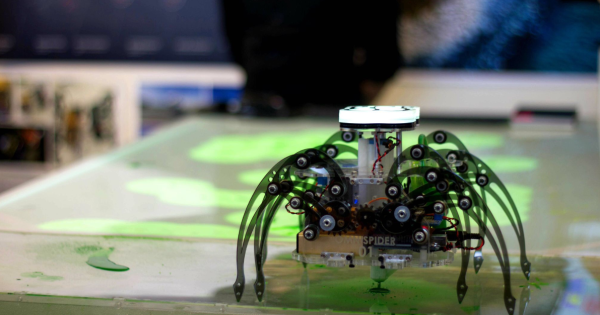
The body is a laminate of silicone rubber and a collection of 200,000 rat heart muscle cells. The cardiomyocytes provide the contractile force, and the pattern in which they are applied to the 1/2″ (1.25cm) body allows for the familiar undulating motion of a stingray’s wings. A gold endoskeleton with enough stiffness to act as a spring is used to counter the contraction of the muscle fibers and reset the system for another wave. Very clever stuff, but perhaps the coolest bit is that the muscle cells are genetically engineered to be photosensitive, making the robofish controllable with pulses of light. Check out the video below to see the robot swimming through an obstacle course.
This is obviously far from a finished product, but the possibilities are limitless with this level of engineering, especially with a system that draws energy from its environment like this one does. Just think about what could be accomplished if a microcontroller could be included in that gold skeleton.
Continue reading “Tissue-Engineered Soft Robot Swims Like A Stingray”