So, maybe right now isn’t the best time to get into the high-altitude ballooning hobby? At least in the US, which with the downing of another — whatever? — over Alaska, seems to have taken a “Sidewinders first, threat identification later” approach to anything that floats by. The latest incident involved an aircraft of unknown type, described as “the size of a small car” — there’s that units problem again — that was operating over Prudhoe Bay off the northern coast of Alaska. The reason that was given for this one earning a Sidewinder was that it was operating much lower than the balloon from last week, only about 40,000 feet, which is well within the ceiling of commercial aviation. It was also over sea ice at the time of the shootdown, making the chance of bothering anyone besides a polar bear unlikely. We’re not taking any political position on this whole thing, but there certainly are engineering and technical aspects of these shootdowns that are pretty interesting, as well as the aforementioned potential for liability if your HAB goes astray. Nobody ever really benefits from having an international incident on their resume, after all.
We’ve seen all kinds of interfaces come and go over the years, from keyboards and mice to lightpens and touchscreens. Now, a group of researchers at the University of Tokyo have built a device that enables haptic interaction with a balloon.
It takes quite a rig to achieve this feat. A vaguely-spherical frame is used, which mounts eleven airborne ultrasound phased arrays, or AUPA. Each phased array is made up of many ultrasonic transducers, with the machine having 2739 individual transducers in total. The phased arrays are controlled in such a way to create a sound field that moves the balloon around and holds it in various desired positions. Closed loop control is achieved with the use of stereo cameras, which track the balloon’s position at high speed.
The system allows the balloon to be moved around quickly in three dimensions. Plus, a user can touch and interact with the balloon directly as it floats in mid-air. They can even drag and redirect the balloon, which can be tracked by the stereo camera system.
The research team don’t highlight any particular applications for this technology at this stage. We’re not expecting the Touch Balloon on next year’s Surface Pro or the next MacBook, that’s for sure. However, it’s great fun to look at and likely has some creative applications that we can’t think of off the top of our heads. Share yours in the comments.
What do you do with floral wire and balloons from Dollar Tree? If you are [Ham Radio Crash Course], you make a ham radio antenna. Floral wire is conductive, and using one piece as a literal sky hook and the other as a ground wire, it should do something. He did use, as you might expect, a tuner to match the random wire length.
The first attempt had too few balloons and too much wind. He eventually switched to a non-dollar store helium tank. That balloon inflates to about 36 inches and appears to have plenty of lift. It looks like by the end he was using two of them.
The Project Horus team routinely launches high-altitude balloons in Australia. However, despite their desire for it, they haven’t beamed back live video. Until now. Horus 55 beamed video back to the ground from over 100,000 feet using a Raspberry Pi and some software-defined radio gear. Be sure and check out their video, below.
You might think this is easy, but there are many technical hurdles. First, the transmitter needs some power, but the thin atmosphere creates problems with cooling. In addition a really good receiving station is required, and the project wanted to stream that video to the Internet, which they were able to do.
The balloon carried a Raspberry Pi Zero W to capture and compress video. A LimeSDR Mini provided the DVB-S transmission on 70cm along with a power amplifier to get to about 800mW. Power dissipation in the payload was about 6 watts and required a special heat sink system to operate. The payload was powered by eight lithium AA primary cells, which perform well at low temperatures.
[Dave Akerman]’s ongoing high altitude balloon (HAB) work is outstanding, and we’re all enriched by the fact that he documents his work like he does. Recently, [Dave] wrote about his balloon tracker based on the Raspberry Pi Pico, whose capabilities brought a couple interesting features to the table.
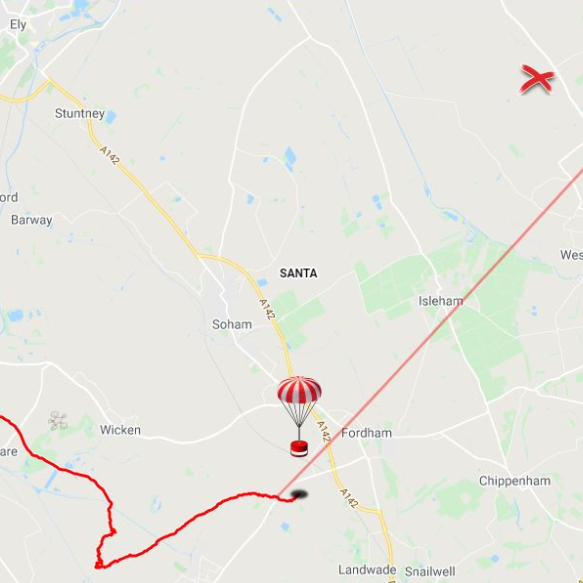
In a way, HAB trackers have a fairly simple job: read sensors such as GPS and constantly relay that data to someone on the ground so that the balloon’s location can be tracked, and the hardware recovered when it ultimately returns to Earth. There are a lot of different ways to do this tracking, and one thing [Dave] enjoys is getting his hands on a new board and making a HAB tracker out of it. That’s exactly what he has done with the Raspberry Pi Pico.
Nothing builds familiarity like actually using a part, and the Pico had some useful things to contribute to a HAB tracker application. For one thing, the Pico has an onboard buck-boost converter that allows it to be powered from a relatively wide voltage range (~1.8 V to 5.5 V), so running it directly from batteries is both possible and desirable from a tracker perspective. But a really useful feature was possible thanks to the large amount of memory on the Pico: dynamic landing prediction.
[Dave] does landing prediction prior to launch based on environmental conditions, but it’s always better if the HAB tracker can also calculate its own prediction based on actual observed events and conditions. A typical microcontroller board like an Arduino doesn’t have enough memory to store the required data upon which to do such calculations, but the Pico does so easily. [Dave]’s new board transmits an updated landing site prediction along with all the rest of the telemetry, making the retrieval process much more reliable.
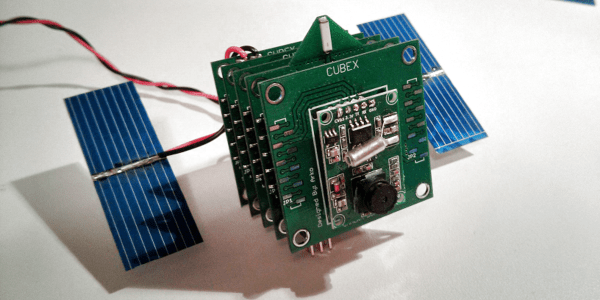
A key challenge for any system headed up into the upper-atmosphere region sometimes called near space is communicating back down to the ground. The sensors and cameras onboard many high altitude balloons and satellites aren’t useful if the data they collect can’t be retrieved. Often times, custom antennas or beacons are added to help. Looking at the cost and difficulty of the problem, [arko] and [upaut] teamed up to try and make a turn-key solution for any near-space enthusiast by building CUBEX, a wonderful little module with sensors and clever radio that can be easily reused and repurposed.
CUBEX is meant as a payload for a high-altitude balloon with a camera, GPS, small battery, solar cell, and the accompanying power management circuits. The clever bit comes in the radio back down. By using the 434.460 Mhz band, it can broadcast around a hundred miles at 10mW. The only hardware to receive is a radio listener (a cheap RTL USB stick works nicely). Pictures and GPS coordinates stream down at 300 baud.
Their launch was quite successful and while they didn’t catch a solar eclipse, their balloon reached an impressive 33698m (110,560ft) while taking pictures. Even though it did eventually splashdown in the Pacific Ocean, they were able to enjoy a plethora of gorgeous photos thanks to their easy and cost-effective data link.
Tech history is rife with examples of bizarre product demos, but we’ve got to think that Elon Musk’s Neuralink demo this week will have to rank up there with the weirdest of them. Elon’s job here was to sell the proposition that having a quarter-sized plug removed from your skull by a surgical robot and having it plunge 1,024 tiny wires into your gray matter will be totally normal and something that all the cool kids will be doing someday. We watched the 14-minute supercut of the demo, which went on for considerably longer than that due to the realities of pig wrangling, and we remain unsold on the technology. Elon selling it as “a Fitbit in your skull, with tiny wires” probably didn’t help, nor did the somewhat terrifying appearance of the surgical robot needed to do the job. On the other hand, Gertrude the Bionic Pig seemed none the worse for her implant, which was reportedly wired to her snout and sending data wirelessly. The demonstration of reading joint positions directly from the brain was honestly pretty neat. If you want to dive deeper into Neuralink, check out Maya’s great article that separates fact from science fiction.
Jerry Carr, NASA astronaut and commander of the third and final crewed Skylab mission, passed away this week at the age of 88. Carr’s Skylab 4 mission was record-breaking in 1974, with the three astronauts living and working in the orbiting workshop for 84 days. The mission contributed a vast amount of information on space medicine and the human factors of long-duration spaceflight. Carr retired from NASA in 1977 and had a long career as an engineer and entrepreneur. It’s sad to lose yet another of the dwindling number of heroes remaining from NASA’s manned-flight heyday.
Speaking of spaceflight, the closest most of us DIYers can get to space is likely courtesy of a helium-filled balloon. If you’ve ever considered sending something — or someone — aloft, you’ll find this helium balloon calculator an invaluable tool. Just plug in the weight of your payload, select from a few common balloon sizes, and the calculator will tell you how many you need and how much gas it will take to fill them. It’s got a second section that tells you how many more balloons it’ll take to get to a certain altitude, should merely getting off the ground not be enough for you.
If 2020 has proven anything, it’s that time is, at best, a negotiable concept. Improbably, September is only a day away, after an August that somehow took forever to go by in the blink of an eye. With that in mind, October is OSHWA’s Open Hardware Month, with this year’s theme being “Label and Certify”. We’re a little bit in love with the Open Hardware Facts generator, which takes your open-source hardware, software, and documentation license and generates a USDA “Nutrition Facts”-style label for your product. They’ve also added tools to make it easier to get OSHWA certification for your project.
And finally, what would it be like to pilot a giant exoskeleton? Like, a 9,000 pound (4,100 kg), quadrupedal all-terrain beast of a mech? Turns out you can (theoretically) find out for yourself courtesy of Furrion Exo-Bionics and their monster mech, dubbed Prosthesis. The machine has been in development for a long time, with the vision of turning mech racing into the next big thing in sports entertainment. Their Alpha Mech Pilot Training Program will allow mere mortals to learn how to pilot Prosthesis at the company’s proving ground in British Columbia. Details are sparse, so caveat emptor, but it sure looks like fun.