Today, when we say “Jesus nut”, we’re not referring to the people who spend their days proselytizing down at the mall. The term, likely spawned in the Vietnam war, refers to the main nut holding the rotors on to the mast of a helicopter which is in the shape of the Christian cross. If the “Jesus nut” was to fail, the rotors would detach from the craft, and there would be little for crews to do except to pray.
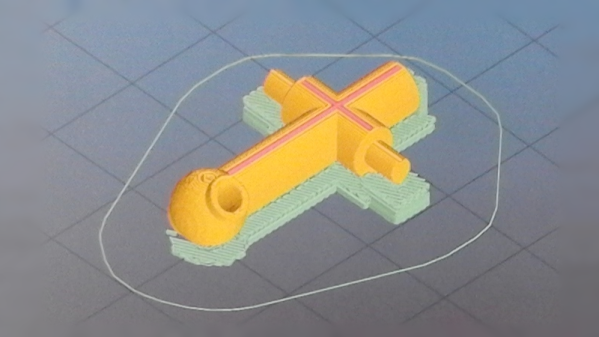
[Marius] was presented with a failed Jesus nut, though thankfully from an R/C helicopter, meaning there was no loss of life. A friend needed the part replaced for their FQ777 copter, so it was time to bust out the 3D printer and get to work.
The first step was to reconstruct the broken piece so it could be measured and then modeled in CAD software with the help of calipers to determine the original dimensions. What followed will be familiar to many 3D printing enthusiasts — a case of educated trial and error, experimenting with different filaments and print settings until a usable part was produced. [Marius] notes on the part’s Thingiverse page that they achieved the best print with an 0.2mm layer height, and printing two parts at once to allow the layers more time to cool during each pass. It was then a simple matter of tidying up the part with sandpaper and a drill bit before installing it on the vehicle.
[Marius] reports that the part was successful, being both strong enough to withstand the forces involved as well as having a fit that was just right to suit the rotor pin which needs to be able to turn freely within the Jesus nut. While they’re not always the right tool for the job, 3D printed replacement parts can sometimes surprise you. These prints that are used in repair work often don’t attract the same interest as printing cosplay armor, kinetic art, and low-poly Pokemon. But they quickly prove how transformative having a 3D printer, and the skills to use it, are. That’s why we’re running the Repairs You Can Print contest… take a few minutes to show off the really useful repairs you’ve pulled off with your 3D printer!
The Syma S107G is a venerable stalwart of the micro helicopter market. Affordable, robust, and ubiquitous, the S107G relies on infrared to receive its control signals. Emboldened by the prior work of others, [Robert] set out to control his with a Playstation 2 controller.
In this project, [Robert] is standing on the shoulders of giants, so to speak – we’ve seen others reverse engineer the S107G’s communications protocol before. [Robert] combined the efforts of several others to understand how to send commands to the helicopter, including use of two separate channels for controlling two at once.
With the knowledge of the necessary protocols, it’s then a matter of hooking up 3 LEDs in a somewhat unconventional series arrangement with a 9 volt supply, to be switched by an Arduino hooked up to a computer. A Javascript application running on the computer reads the state of a Playstation 2 controller, and spits it out over serial to the Arduino, which flashes the LEDs.
It’s not the neatest, most lightweight way of building a new controller for your remote control toy, but it does show how quickly one can throw together a project in a weekend by combining modern hardware and software tools. Plus, it’s a great learning experience on a platform that’s been experimented with the world over.
Our hats off to [SpeedyCop] and his [Gang of Outlaws] for turning a junked former Vietnam War helicopter into both an amphibious vehicle and a road race car. Yes, that’s right. It’s both driven on water and raced in the 24 Hours of LeMons at New Jersey Motorsports Park.
It started life as a 1969 Bell OH-58 Kiowa (US Army Vietnam Assault helo) and had not only served in Vietnam but also for a federal drug task force. It was chopped up for parts and the body found its way to [SpeedyCop] and friends. The body now sits on an 80s Toyota van chassis, has a Mazda Miata rear suspension, and Audi 3.0 V6 engine.
The pontoons were originally added to hide the seam between the helicopter body and the van but they then inspired the idea of making it amphibious. And with the addition of a four-blade, 7000 RPM propeller from a parasail boat, the idea became reality, as you can see in the video after the break (we suspect the trailing line is a rope to pull it back to shore in case of engine failure).
At my university, we were all forced to take a class called Engineering 101. Weirdly, we could take it at any point in our careers at the school. So I put it off for more interesting classes until I was forced to take it in one of my final years. It was a mess of a class and never quite seemed to build up to a theme or a message. However, every third class or so they’d dredge up a veritable fossil from their ranks of graduates. These greybeards would sit at the front of the class and tell us about incredible things. It was worth the other two days of nondescript rambling by whichever engineering professor drew the short straw for one of their TAs.
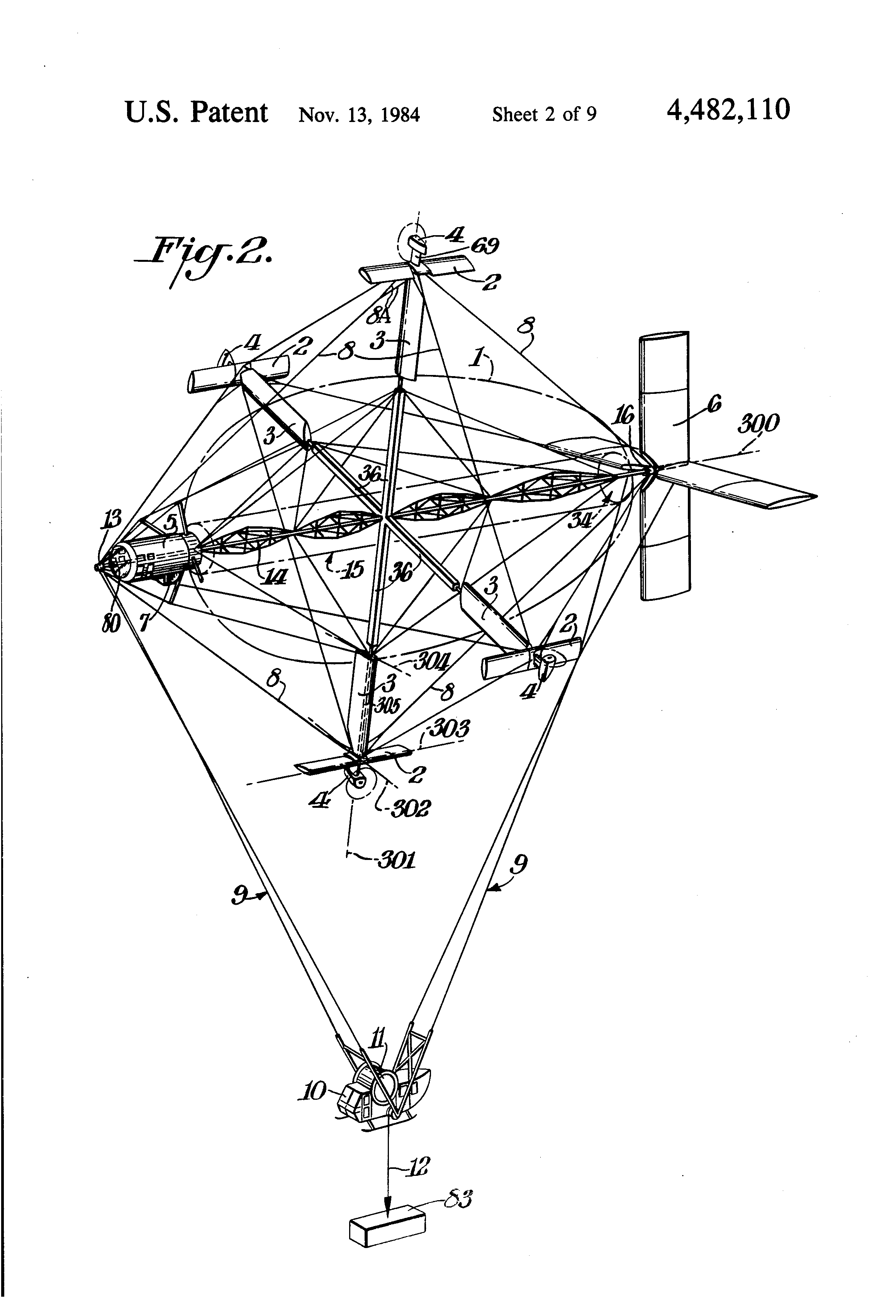
The patent drawing.
One greybeard in particular had a long career in America’s unending string of, “Build cool stuff to help us make bad guys more deader,” projects. He worked on stealth boats, airplanes with wings that flex, and all sorts of incredibly cool stuff. I forgot about the details of those, but the one that stuck with me was the Cyclocrane. It had a ton of issues, and as the final verdict from a DARPA higher-up with a military rank was that it, “looked dumb as shit” (or so the greybeard informed us).
A Cyclo-What?
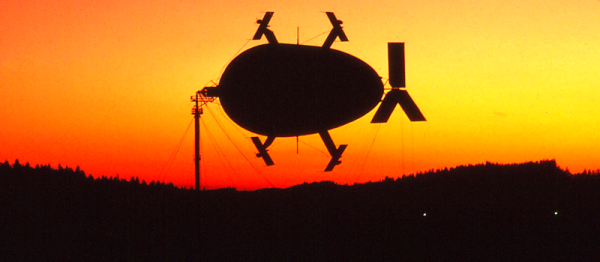
The Cyclocrane was a hybrid airship. Part aerodynamic and part aerostatic, or more simply put, a big balloon with an airplane glued on. Airships are great because they have a constant static lift, in nearly all cases this is buoyancy from a gas that is lighter than air. The ship doesn’t “weigh” anything, so the only energy that needs to be expended is the energy needed to move it through the air to wherever it needs to go. Airplanes are also great, but need to spend fuel to lift themselves off the ground as well as point in the right direction. Helicopters are cool because they make so much noise that the earth can’t stand to be near them, providing lift. Now, there’s a huge list of pros and cons for each and there’s certainly a reason we use airplanes and not dirigibles for most tasks. The Cyclocrane was designed to fit an interesting use case somewhere in the middle.
In the logging industry they often use helicopters to lift machinery in and out of remote areas. However, lifting two tons with a helicopter is not the most efficient way to go about it. Airplanes are way more efficient but there’s an obvious problem with that. They only reach their peak efficiency at the speed and direction for which their various aerodynamic surfaces have been tuned. Also worth noting that they’re fairly bad at hovering. It’s really hard to lift a basket of chainsaws out of the woods safely when the vehicle doing it is moving at 120mph.
The cyclocrane wanted all the efficiency of a dirigible with the maneuverability of a helicopter. It wanted to be able to use the effective lifting design of an airplane wing too. It wanted to have and eat three cakes. It nearly did.
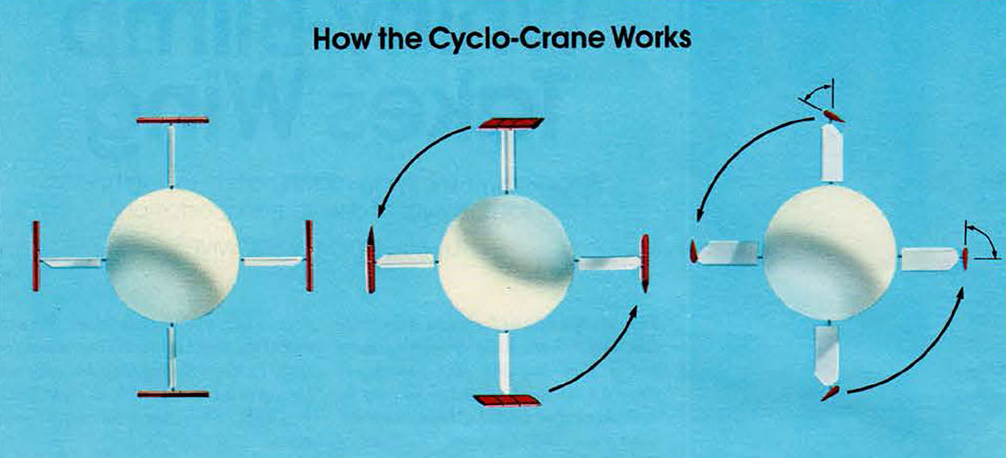
A Spinning Balloon with Wings
Four wings stick out of a rotating balloon. The balloon provides half of the aerostatic lift needed to hold the plane and the cargo up in the air. The weight is tied to the static ends of the balloon and hang via cables below the construction. The clever part is the four equidistant wings sticking out at right angles from the center of the ship. At the tip of each wing is a construction made up of a propellor and a second wing. Using this array of aerofoils and engines it was possible for the cyclocrane to spin its core at 13 revolutions per minute. This produced an airspeed of 60 mph for the wings. Which resulted in a ton of lift when the wings were angled back and forth in a cyclical pattern. All the while, the ship remaining perfectly stationary.
Now the ship had lots of problems. It was too heavy. It needed bigger engines. It was slow. It looked goofy. It didn’t like strong winds. The biggest problem was a lack of funding. It’s possible that the cyclocrane could have changed a few industries if its designers had been able to keep testing it. In the end it had a mere seven hours of flying time logged with its only commercial contract before the money was gone.
However! There may be some opportunity for hackers here. If you want to make the quadcopter nerds feel a slight sting of jealousy, a cyclocrane is the project for you. A heavy lift robot that’s potentially more efficient than a balloon with fans on it is pretty neat. There’s a bit of reverse engineering to be done before a true performance statement can be made. If nothing else. It’s just a cool piece of aerospace history that reminds us of the comforting fact that we haven’t even come close to inventing it all yet.
If you’d like to learn more there’s a ton of information and pictures on one of the engineer’s website. Naturally wikipedia has a bit to say. There’s also decent documentary on youtube, viewable below.
[Rui] enjoys his remote-controlled helicopter hobby and he was looking for a way to better track the temperature of the helicopter’s engine. According to [Rui], engine temperature can affect the performance of the craft, as well as the longevity and durability of the engine. He ended up building his own temperature logger from scratch.
The data logger runs from a PIC 16F88 microcontroller mounted to a circuit board. The PIC reads temperature data from a LM35 temperature sensor. This device can detect temperatures up to 140 degrees Celsius. The temperature sensor is mounted to the engine using Arctic Alumina Silver paste. The paste acts as a glue, holding the sensor in place. The circuit also contains a Microchip 24LC512 EEPROM separated into four blocks. This allows [Rui] to easily make four separate data recordings. His data logger can record up to 15 minutes of data per memory block at two samples per second.
Three buttons on the circuit allow for control over the memory. One button selects which of the four memory banks are being accessed. A second button changes modes between reading, writing, and erasing. The third button actually starts or stops the reading or writing action. The board contains an RS232 port to read the data onto a computer. The circuit is powered via two AA batteries. Combined, these batteries don’t put out the full 5V required for the circuit. [Rui] included a DC-DC converter in order to boost the voltage up high enough.
Tired of wiring up the power rails and serial adapter every time you build something on a breadboard? [Jason] has you covered. He put his Breadboard Buddy Pro up on Indiegogo, and it does everything you’d expect it to: power rails, USB to UART bridge, and a 3.3 V regulator. Oh, he’s not using an FTDI chip. Neat.
With Christmas around the corner, a lot of those cheap 3-channel RC helicopters are going to find their way into stockings. They’re cool toys, but if you want to really have fun with them, you’ll need to add a penny.
Mankind has sent space probes to the surface – and received pictures from – Venus, Mars, the Moon, Titan, asteroids Itokawa and Eros, and comet Comet 67P/Churyumov–Gerasimenko. In a beautiful bit of geological irony, every single one of these celestial bodies looks like a rock quarry in Wales. That quarry is now for sale.
Here’s something exceptionally interesting. It’s a browser plugin that takes a BOM, and puts all the components into a cart. Here’s the cool bit: it does it with multiple retailers. The current retailers supported are Mouser, Digikey, Farnell/Element14, Newark, and RS Components.
Though this project uses an RC helicopter, it’s merely a vessel to demonstrate a fascinating machine learning algorithm developed by two Cornell students – [Akshay] and [Sergio]. The learning environment is set up with the helicopter at its center, attached to a boom. The boom restricts the helicopter’s movement down to one degree of motion, so that it can only move up from the ground (not side to side or front to back).
The goal is for the helicopter to teach itself how to get to a specific height in the quickest amount of time. A handful of IR sensors are used to tell the Atmega644 how high the helicopter is. The genius of this though, is in the firmware. [Akshay] and [Sergio] are using an evolutionary algorithm adopted from Floreano et al, a noted author on biological inspired artificial intelligences. The idea is for the helicopter to create random “runs” and then check the data. The runs that are closer to the goal get refined while the others are eliminated, thus mimicking evolutions’ natural selection.
We’ve seen neural networks before, but nothing like this. Stay with us after the break, as we take this awesome project and narrow it down so that you too can implement this type of algorithm in your next project.