ALS robbed one of [C. Niggel]’s relative’s of the use of their upper body. This effectively imprisoned them in their house; ALS is bad stuff. Unfortunately too, the loss of upper body mobility meant that they couldn’t even use the computer to interact with people and the outside world. However, one day [C. Niggel] noted that the relative’s new electric wheelchair was foot controlled. Could this be adapted to a computer mouse?
He looked up commercial solutions and found them not only prohibitively expensive, but also fraught with proprietary drivers and all sorts of bad design nonsense. With all of the tools out there today there was no reason this couldn’t be quickly prototyped and sent to the relative in need.
He used a combination of conductive thread, neoprene, and velostat to build the pads themselves. The pads were balanced with some adjusting resistors in series. The signals are sent to an Adafruit Feather board which interprets them and converts it to a PS/2 standard.
The first version of the mouse used separate pads glued to a MDF board with contact cement. However this, along with some other initial design flaws, resulted in premature failure of the mouse. [C. Niggel] quickly returned to the lab and produced a new version with more robust construction and mailed it off. So far so good!
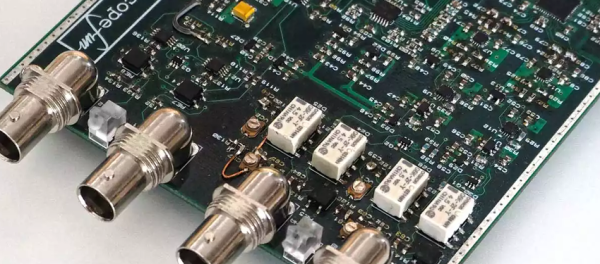
If you could only own one piece of test equipment, it should probably be an oscilloscope. Then again, modern scopes often have multiple functions, so maybe that’s not a fair assertion. A case in point is the Scopefun open hardware project. The device is a capable 2-channel scope, a logic analyzer and also a waveform and pattern generator. The control GUI can work with Windows, Linux, or the Mac (see the video, below).
The hardware uses a Xilinx Spartan-6 FPGA. A GUI uses a Cypress’s EZ-USB FX2LP chip to send configuration data to the FPGA. Both oscilloscope channels are protected for overvoltage up to +/- 50 V. The FPGA samples at 100 Mhz through a 10-bit dual analog-to-digital converter ( ADC ). The FPGA handles triggering and buffers the input before sending the data to the host computer via the USB chip. Each channel has a 10,000 sample buffer.
There are also two generator outputs with short circuit and overvoltage protection ( +/- 50 V ). Generator channels have 50 Ohm internal impedance and also operates via the GUI using the same USB chip. The FPGA generates signals at 50 Mhz using counters, algorithms, or simple waveform data and feeds a DAC.
A 16-bit digital interface can be set as inputs or outputs. The FPGA samples inputs at 100 MHz. The output voltage can be set, but inputs are 5 V tolerant.
According to the developer, you can build the scope from the information provided by using free sample chips from the various vendors, only paying for the small components and the cost of the PCB.
We’ve looked at several low-cost scope options before. Labtool even boasts some similar features.
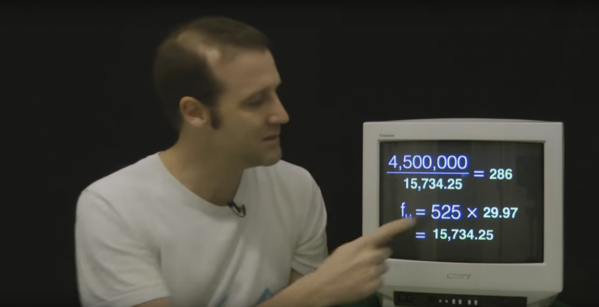
Ever wonder why analog TV in North America is so weird from a technical standpoint? [standupmaths] did, so he did a little poking into the history of the universally hated NTSC standard for color television and the result is not only an explanation for how American TV standards came to be, but also a lesson in how engineers sometimes have to make inelegant design compromises.
Before we get into a huge NTSC versus PAL fracas in the comments, as a resident of the US we’ll stipulate that our analog color television standards were lousy. But as [standupmaths] explores in some depth, there’s a method to the madness. His chief gripe centers around the National Television System Committee’s decision to use a frame rate of 29.97 fps rather than the more sensible (for the 60 Hz AC power grid) 30 fps. We’ll leave the details to the video below, but suffice it to say that like many design decisions, this one had to do with keeping multiple constituencies happy. Or at least equally miserable. In the end [standupmaths] makes it easy to see why the least worst decision was to derate the refresh speed slightly from 30 fps.
Given the constraints they were working with, that fact that NTSC works as well as it does is pretty impressive, and quite an epic hack. And apparently inspiring, too; we’ve seen quite a few analog TV posts here lately, like using an SDR to transit PAL signals or NTSC from a microcontroller.
Like many of us, [Alex] spent a large part of his childhood feeding coin after coin into one arcade game or another. Galaga is one of his all-time favorites, and he has wanted to build a Galaga cabinet for a long time. Once his workshop was ready for the job, it was time to cross it off the list.
The cabinet is built to 4/5 scale. This is a great size because he gets the stability and feel of a full-size machine, but it’s much easier to move it around. As you might expect, there’s Pi in the cabinet. The display is an old TV that [Alex] found in a Dumpster. And although it works great, it would go into standby instead of powering off along with everything else. To get around this, [Alex] built an automatic remote control with an IR LED and an Arduino Diecimila. After a five-second wait, it sends the power-on code to the TV and switches the input. The TV is supposed to be in portrait mode for Galaga, but this proved to be a challenge. Changing the orientation at the Pi level resulted in poor performance and choppy sound, so he changed it at the game execution level.
We are continually impressed by the diversity of [Alex]’s builds and the care that goes into them. Who could forget his beautiful sidewalk graffiti machine or the time he showed us how to photograph stuff that’s not there? Make the jump to see a brief demonstration followed by a two-part build video.
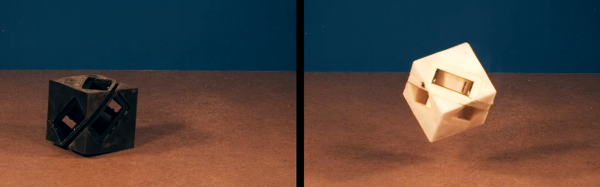
MIT’s Computer Science and Artificial Intelligence Laboratory, CSAIL, put out a paper recently about an interesting advance in 3D printing. Naturally, being the computer science and AI lab the paper had a robotic bend to it. In summary, they can 3D print a robot with a rubber skin of arbitrarily varying stiffness. The end goal? Shock absorbing skin!
They modified an Objet printer to print simultaneously using three materials. One is a UV curing solid. One is a UV curing rubber, and the other is an unreactive liquid. By carefully depositing these in a pattern they can print a material with any property they like. In doing so they have been able to print mono body robots that, simply put, crash into the ground better. There are other uses of course, from joints to sensor housings. There’s more in the paper.
We’re not sure how this compares to the Objet’s existing ability to mix flexible resins together to produce different Shore ratings. Likely this offers more seamless transitions and a wider range of material properties. From the paper it also appears to dampen better than the alternatives. Either way, it’s an interesting advance and approach. We wonder if it’s possible to reproduce on a larger scale with FDM.
At my university, we were all forced to take a class called Engineering 101. Weirdly, we could take it at any point in our careers at the school. So I put it off for more interesting classes until I was forced to take it in one of my final years. It was a mess of a class and never quite seemed to build up to a theme or a message. However, every third class or so they’d dredge up a veritable fossil from their ranks of graduates. These greybeards would sit at the front of the class and tell us about incredible things. It was worth the other two days of nondescript rambling by whichever engineering professor drew the short straw for one of their TAs.
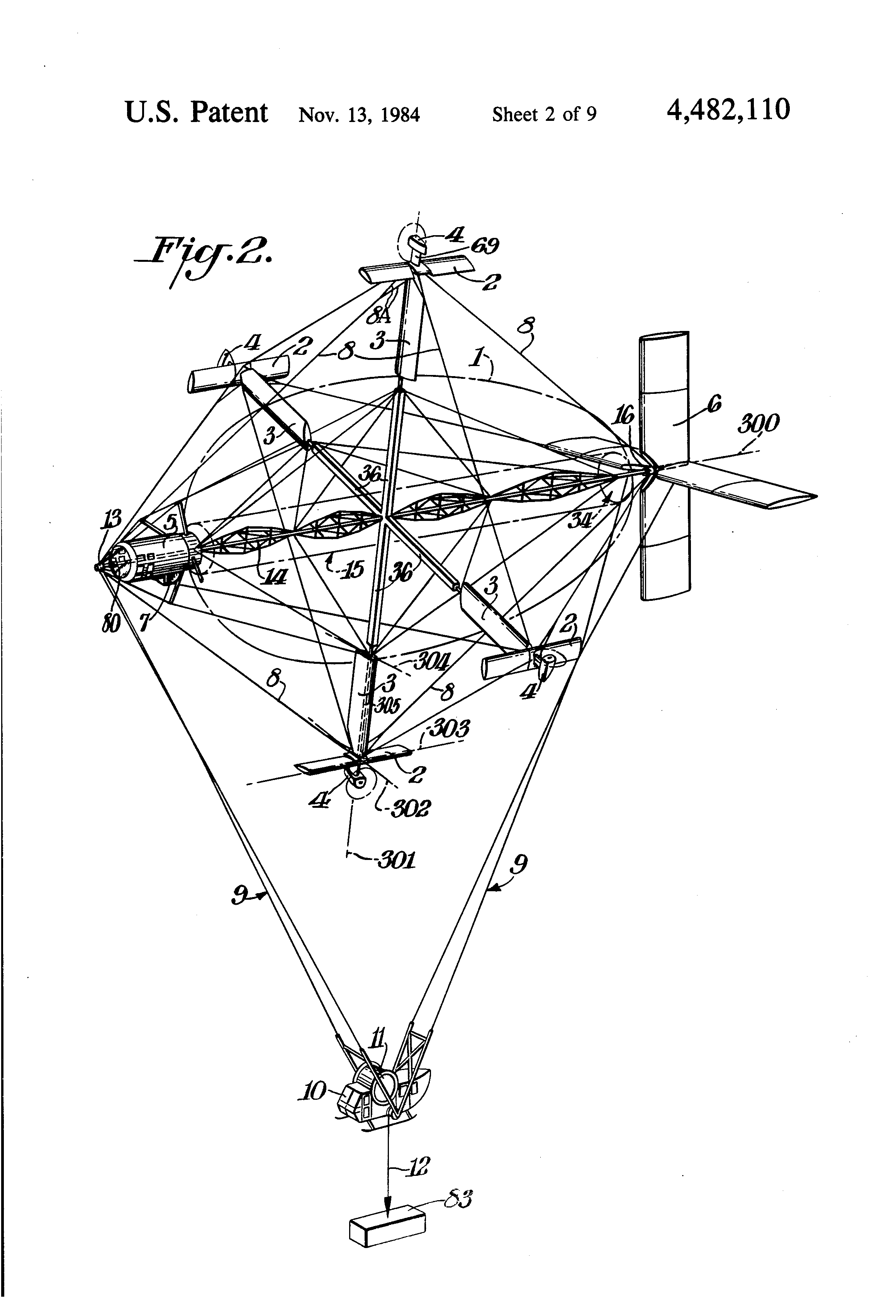
The patent drawing.
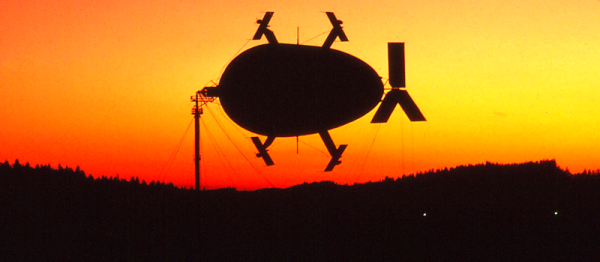
One greybeard in particular had a long career in America’s unending string of, “Build cool stuff to help us make bad guys more deader,” projects. He worked on stealth boats, airplanes with wings that flex, and all sorts of incredibly cool stuff. I forgot about the details of those, but the one that stuck with me was the Cyclocrane. It had a ton of issues, and as the final verdict from a DARPA higher-up with a military rank was that it, “looked dumb as shit” (or so the greybeard informed us).
A Cyclo-What?
The Cyclocrane was a hybrid airship. Part aerodynamic and part aerostatic, or more simply put, a big balloon with an airplane glued on. Airships are great because they have a constant static lift, in nearly all cases this is buoyancy from a gas that is lighter than air. The ship doesn’t “weigh” anything, so the only energy that needs to be expended is the energy needed to move it through the air to wherever it needs to go. Airplanes are also great, but need to spend fuel to lift themselves off the ground as well as point in the right direction. Helicopters are cool because they make so much noise that the earth can’t stand to be near them, providing lift. Now, there’s a huge list of pros and cons for each and there’s certainly a reason we use airplanes and not dirigibles for most tasks. The Cyclocrane was designed to fit an interesting use case somewhere in the middle.
In the logging industry they often use helicopters to lift machinery in and out of remote areas. However, lifting two tons with a helicopter is not the most efficient way to go about it. Airplanes are way more efficient but there’s an obvious problem with that. They only reach their peak efficiency at the speed and direction for which their various aerodynamic surfaces have been tuned. Also worth noting that they’re fairly bad at hovering. It’s really hard to lift a basket of chainsaws out of the woods safely when the vehicle doing it is moving at 120mph.
The cyclocrane wanted all the efficiency of a dirigible with the maneuverability of a helicopter. It wanted to be able to use the effective lifting design of an airplane wing too. It wanted to have and eat three cakes. It nearly did.
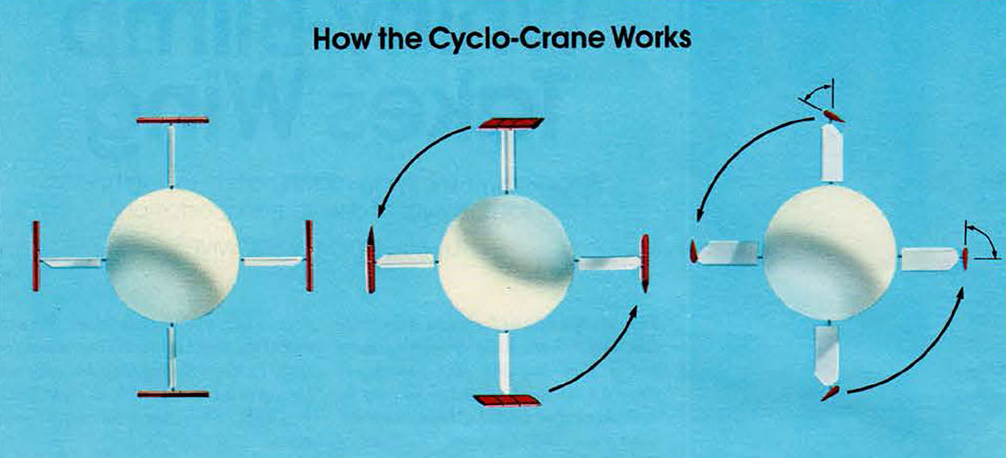
A Spinning Balloon with Wings
Four wings stick out of a rotating balloon. The balloon provides half of the aerostatic lift needed to hold the plane and the cargo up in the air. The weight is tied to the static ends of the balloon and hang via cables below the construction. The clever part is the four equidistant wings sticking out at right angles from the center of the ship. At the tip of each wing is a construction made up of a propellor and a second wing. Using this array of aerofoils and engines it was possible for the cyclocrane to spin its core at 13 revolutions per minute. This produced an airspeed of 60 mph for the wings. Which resulted in a ton of lift when the wings were angled back and forth in a cyclical pattern. All the while, the ship remaining perfectly stationary.
Now the ship had lots of problems. It was too heavy. It needed bigger engines. It was slow. It looked goofy. It didn’t like strong winds. The biggest problem was a lack of funding. It’s possible that the cyclocrane could have changed a few industries if its designers had been able to keep testing it. In the end it had a mere seven hours of flying time logged with its only commercial contract before the money was gone.
However! There may be some opportunity for hackers here. If you want to make the quadcopter nerds feel a slight sting of jealousy, a cyclocrane is the project for you. A heavy lift robot that’s potentially more efficient than a balloon with fans on it is pretty neat. There’s a bit of reverse engineering to be done before a true performance statement can be made. If nothing else. It’s just a cool piece of aerospace history that reminds us of the comforting fact that we haven’t even come close to inventing it all yet.
If you’d like to learn more there’s a ton of information and pictures on one of the engineer’s website. Naturally wikipedia has a bit to say. There’s also decent documentary on youtube, viewable below.
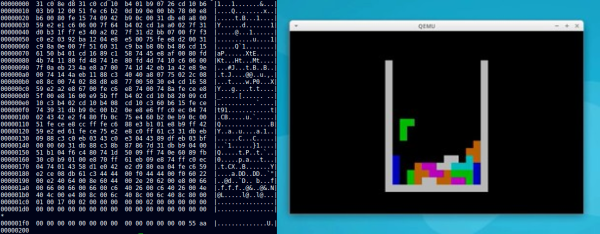
You want to play Tetris. You want to play Tetris on any operating system. You want to play on an old IBM PC, you want to play Tetris on a new MacBook. You want a Tetris that’ll fit inside the master boot record of a disk. You want Tetris as an operating system. You want TetrOS.
Or maybe you don’t, but it’s a fantastic piece of work, and we love tiny demos. Check it out below the break. Or read through the source code in the banner image.