Nissan started off with a massive lead in the electric vehicle industry — their Leaf was the first mass-market EV available and the highest-selling EV until 2020. But the company has begun to lag behind other automotive manufacturers and their more diverse, modern offerings. As an example, the Leaf still doesn’t have active cooling for its battery packs. On the plus side, though, these cars are pretty easy to work on and parts for them are widely available. This includes the battery pack and motor, which can be dropped in to other non-EV Nissan products like this Nissan Frontier.
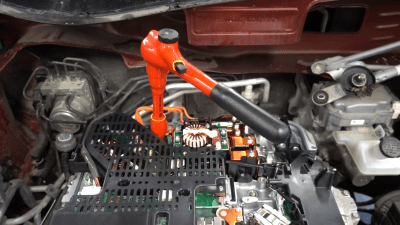
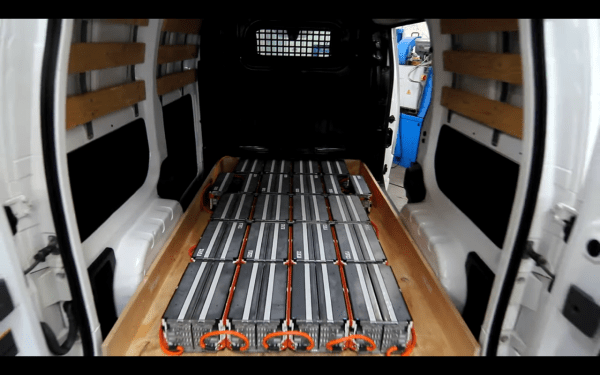
For conversions using the Leaf battery pack and motor, [Paul] points out that it’s important to find the motor with the inverter and power distribution unit all integrated together, rather than sourcing them all separately since they don’t always mix-and-match well. There are several third-party parts available for getting these motors running in other applications, including a coupler to mate the motor to a transmission. However, this still needs some custom fabrication to properly attach to the Frontier’s drivetrain. With a new controller as well, the Frontier engine can be pulled, the Leaf engine dropped in, and the battery set into the bed and connected.
A followup video shows [Paul] driving his new EV down a neighborhood street, but it looks like there are still a few things to polish up before it’s ready to hit the open highway including a more robust housing for the battery. But, if donor vehicles can be found like a truck body and Leaf drivetrain components, this type of modification can be done for a surprisingly small cost. These EV batteries can also be put to work as home power banks as well.
Continue reading “New Frontiers For Nissan Leaf Motor And Battery”