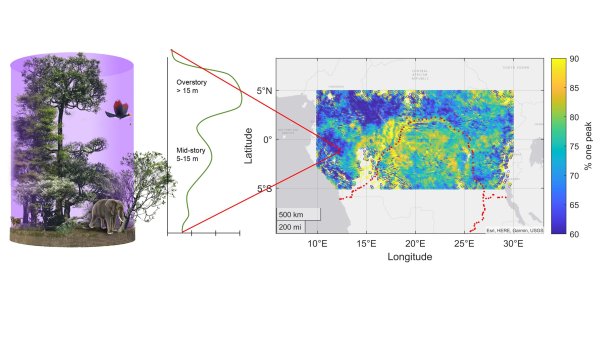
Even though it may seem like we have already explored every single square centimeter of the Earth, there are still many areas that are practically unmapped. These areas include the bottom of the Earth’s oceans, but also the canopy of the planet’s rainforests. Rather having herds of explorers clamber around in the upper reaches of these forests to take measurements, researchers decided to use LiDAR to create a 3D map of these forests (press release).
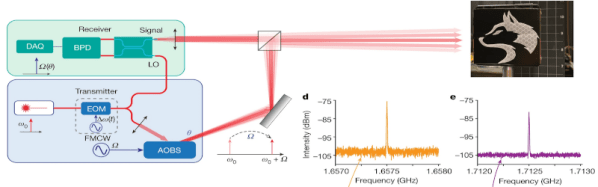
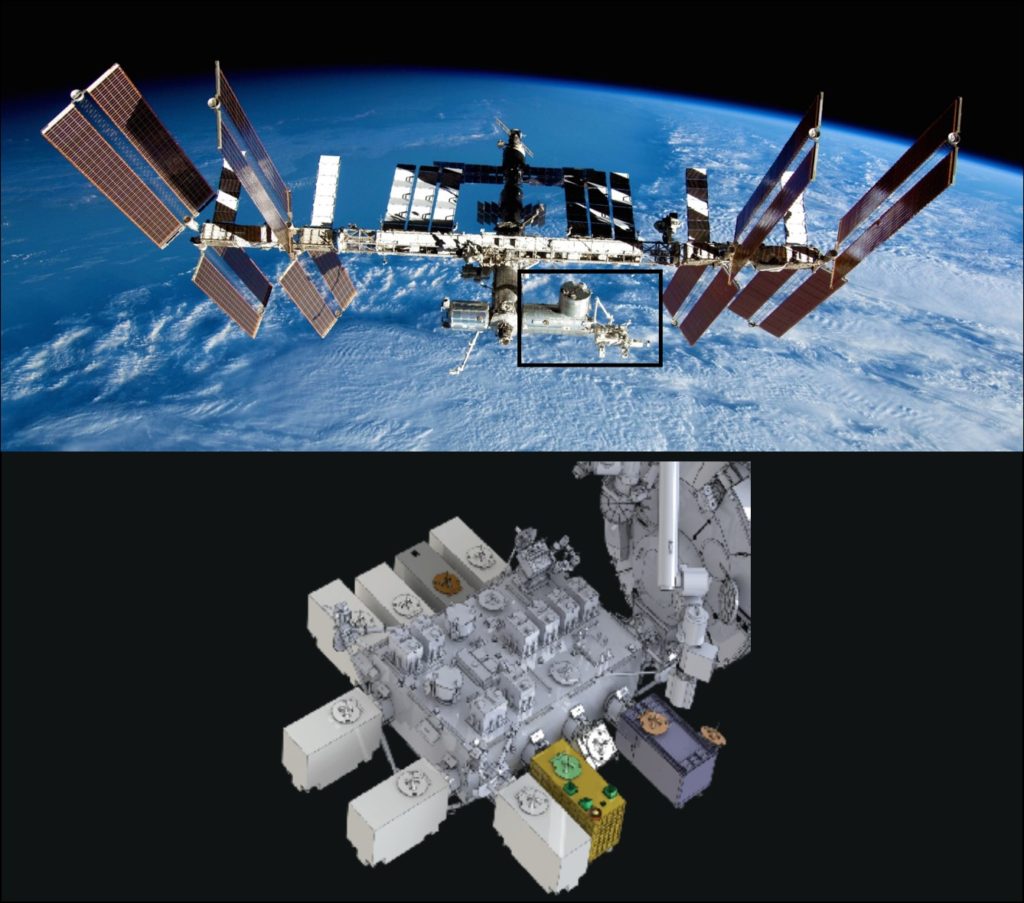
The resulting GEDI (Global Ecosystem Dynamics Investigation) NASA project includes a triple-laser-based LiDAR system that was launched to the International Space Station in late 2018 by CRS-16 where it has fulfilled its two-year mission which began in March of 2019. Included in the parameters recorded this way are surface topography, canopy height metrics, canopy cover metrics and vertical structure metrics.
Originally, the LiDAR scanner was supposed to be decommissioned by stuffing it into the trunk of a Dragon craft before its deorbit, but after NASA found a way to scoot the scanner over to make way for a DOD payload, the project looks to resume scanning the Earth’s forests next year, where it can safely remain until the ISS is deorbited in 2031. Courtesy of the ISS’s continuous orbiting of the Earth, it’ll enable daily monitoring of its rainforests in particular, which gives us invaluable information about the ecosystems they harbor, as well as whether they’re thriving or not.
Hopefully after its hibernation period the orbital LiDAR scanner will be back in action, as the instrument is subjected to quite severe temperature changes in its storage location. Regardless, putting LiDAR scanners in orbit has to be one of those amazing ideas to help us keep track of such simple things as measuring the height of trees and density of foliage.