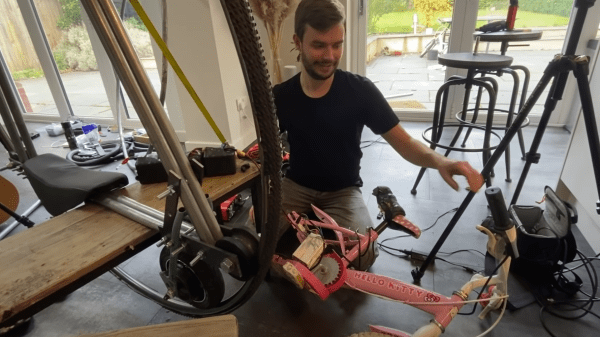
It’s often said that one should not reinvent the wheel, but that doesn’t mean that you cannot change how the use of said wheel should be interpreted. After initially taking the rather zany concept of a monowheel for a literal ride, [Sam Barker] decided to shift gears, did a ‘what if’ and slapped a second monowheel next to the first one to create his diwheel vehicle. Using much thicker steel for the wheels and overall much more robust construction than for his monowheel, the welding could commence.
It should be said here that the concept of a diwheel, or dicycle, isn’t entirely new, but the monowheel – distinct from a unicycle – is much older, with known builds at least as far back as the 19th century. Confusing, self-balancing platforms like Segways are also referred to as ‘dicycles’, while a diwheel seems to refer specifically to what [Sam] built here. That said, diwheels are naturally stable even without gyroscopic action, which is definitely a big advantage.
The inner frame for [Sam]’s diwheel is built out of steel too, making it both very robust and very heavy. High-tech features include suspension for that smooth ride, and SLS 3D-printed nylon rollers between the inner frame and the wheels. After some mucking about with a DIY ‘lathe’ to work around some measurement errors, a lot more welding and some questionable assembly practices, everything came together in the end.
This is just phase one, however, as [Sam] will not be installing pedals like it’s an old-school monowheel. Instead it’ll have electrical drive, which should make it a bit less terrifying than the Ford Ka-based diwheel we featured in 2018, but rather close to the electric diwheel called EDWARD which we featured back in 2011. We hope to see part two of this build soon, in which [Sam] will hopefully take this beast for its first ride.
Continue reading “Building A Diwheel To Add More Tank Controls To Your Commute”