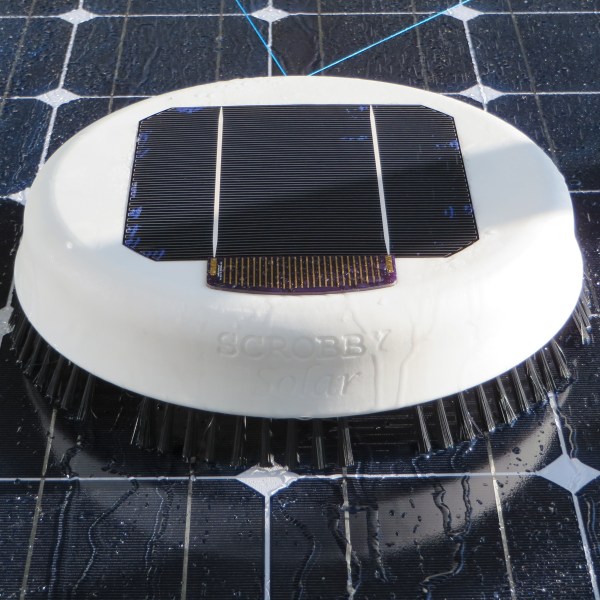
Solar panels are a great, sustainable addition to your home’s energy scheme. They’re bound to get dirty, but they can’t withstand harsh chemicals and still be effective. While there are companies that will come out and clean your installation a few times a year, the service is a recurring cost that adds up quickly. With Scrobby, his entry into The Hackaday Prize, [Stefan] sought to build a highly affordable and sustainable solution that, after installation, requires no dangerous trips back up to the roof.
Scrobby is solar-powered and cleans using rainwater. The user can set and alter the cleaning schedule over Bluetooth from their phone. [Stefan]’s prototype was built around a Teensy 3.0, but he will ultimately use custom boards based on the Freescale KL26. In addition to the Bluetooth module, there are six ultrasonic sensors, rain and temperature sensors, and motor-driven spools for tethered movement.
Make the jump to see Scrobby get his prototype bristles installed and show off his abilities in [Stefan]’s demo video. To register for updates, check out Scrobby’s website. If you hurry, you can donate to Scrobby’s Kickstarter campaign. The question is, who will clean Scrobby’s solar panels?
 This project is an official entry to The Hackaday Prize that sadly didn’t make the quarterfinal selection. It’s still a great project, and worthy of a Hackaday post on its own.
This project is an official entry to The Hackaday Prize that sadly didn’t make the quarterfinal selection. It’s still a great project, and worthy of a Hackaday post on its own.
Continue reading “Scrobby’s On Your Roof, Cleaning Your Solar Panels”


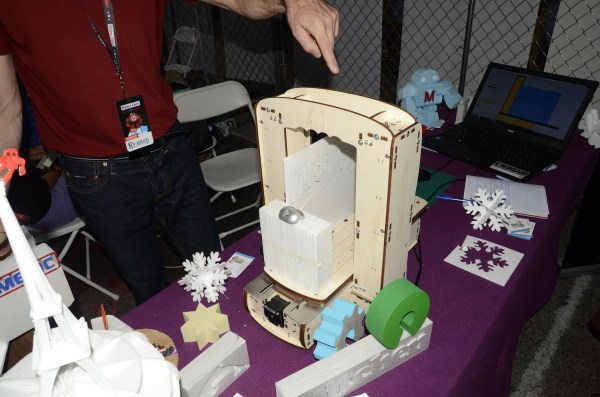
 epper motors much like a 3D printer. Rather than print though, it pulls a heated nichrome wire through styrofoam. Foam cutting is great for crafts, but it really takes off when used for R/C aircraft. [Renaud] was cutting some models out of
epper motors much like a 3D printer. Rather than print though, it pulls a heated nichrome wire through styrofoam. Foam cutting is great for crafts, but it really takes off when used for R/C aircraft. [Renaud] was cutting some models out of