For something that many of us handle all day long, it sure would be nice if mice came in more sizes and shapes, wouldn’t it? Until that day, we’ll just have to find something passable or else design and build a custom-shaped mouse from scratch like [Ben Makes Everything] did.
 First, [Ben] played around with some modelling clay until he had a shape he was happy with, then took a bunch of pictures of it mounted on a piece of wood for easy manipulation and used photogrammetry to scan it in for printing after cleaning it up in Blender. About six versions later, he had the final one and was ready to move on to electronics.
First, [Ben] played around with some modelling clay until he had a shape he was happy with, then took a bunch of pictures of it mounted on a piece of wood for easy manipulation and used photogrammetry to scan it in for printing after cleaning it up in Blender. About six versions later, he had the final one and was ready to move on to electronics.
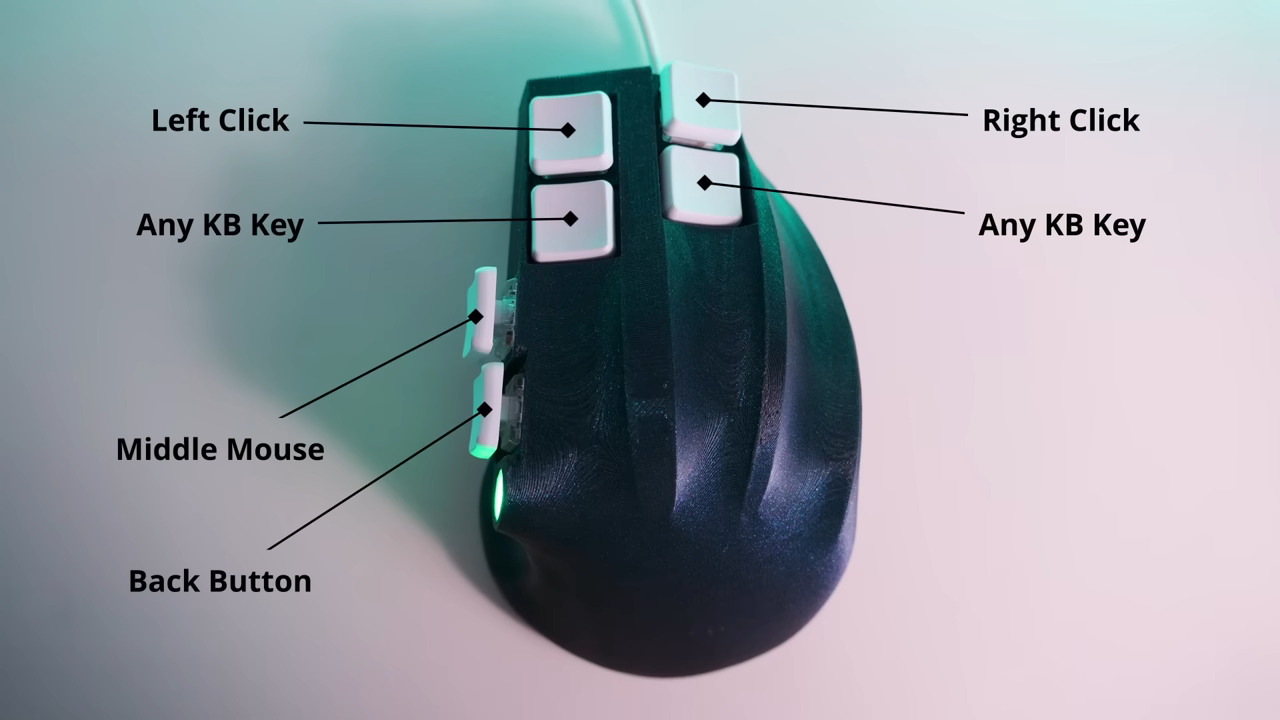
That’s right, this isn’t just mouse guts in an ergonomic package. Inside is Arduino Pro Micro and a PMW 3389 optical sensor on a breakout board. [Ben] was going to use flexible 3D printed panels as mouse buttons, but then had an epiphany — why not use keyboard switches and keycaps instead? He also figured he could have two buttons per finger if he wanted, so he went with Kailh reds for the fingers and and whites in the thumb.
Speaking of the thumb, there was no room for a mouse wheel in between those comparatively huge switches, so he moved it to the the side to be thumb-operated. [Ben] got everything working, and after all this, decided to make it wireless. So he switched to an Adafruit Feather S3 and designed his first PCB for both versions. Ultimately, he found that the wireless version is kind of unreliable, so he is sticking with the wired one for now.