Building exoskeletons for people is a rapidly growing branch of robotics. Whether it’s improving the natural abilities of humans with added strength or helping those with disabilities, the field has plenty of room for new inventions for the augmentation of humans. One of the latest comes to us from a team out of the University of Chicago who recently demonstrated a method of adding brakes to a robotic glove which gives impressive digital control (PDF warning).
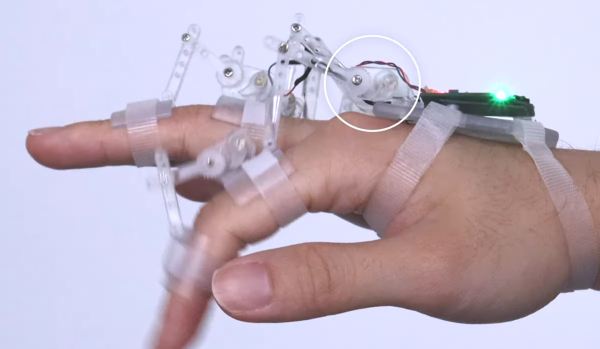
The robotic glove is known as DextrEMS but doesn’t actually move the fingers itself. That is handled by a series of electrodes on the forearm which stimulate the finger muscles using Electrical Muscle Stimulation (EMS), hence the name. The problem with EMS for manipulating fingers is that the precision isn’t that great and it tends to cause oscillations. That’s where the glove comes in: each finger includes a series of ratcheting mechanisms that act as brakes which can position the fingers precisely enough to make intelligible signs in sign language or even play a guitar or piano.
For anyone interested in robotics or exoskeletons, the white paper is worth a read. Adding this level of precision to an exoskeleton that manipulates something as small as the fingers opens up a brave new world of robotics, but if you’re looking for something that operates on the scale of an entire human body, take a look at this full-size strength-multiplying exoskeleton that can help you lift superhuman amounts of weight.
Exoskeletons, power suits, and iron suits in science fiction have served as the inspiration for many engineers and engineering projects over the years. This is certainly the case at [Hacksmith Industries], where Hackaday alum [James Hobson] has been building a massive mechanical exoskeleton since January 2019, inspired by the P-5000 Power Loader from the Alien movies. (Video, embedded below.)
Unlike the movie version, the [Hacksmith] power loader is not bipedal but built on top of the chassis of a small tracked skid-steer loader. Its existing hydraulic power unit also feeds all the upper body hydraulic cylinders. The upper body maintains the basic look of the movie version and was built from plasma-cut steel sections that fit together with a tab and slot system before being welded. Each arm has five degrees of freedom, controlled by proportional hydraulic valves. The power loader is controlled by an industrial grade control system based on the Raspberry Pi, running ROS.
Every single actuator is capable of applying enough force to kill, so safety is an important consideration in the design. It has emergency stop buttons mounted in several locations, including on a wireless remote. The ROS controller monitors the position of every cylinder using string potentiometers for closed-loop control, and to trigger the emergency stop if an actuator goes out of bounds. The power loader can be controlled by the onboard pilot using a pair of simulator flight controller joysticks, or remotely using a PS4 controller.
[Hacksmith Industries] is clear about the fact that they are building multi-ton power loaded for fun and entertainment, not because it’s necessarily practical or a commercially viable product. However, other exoskeletons have proven that they are a viable solution for reducing fatigue and risk of injury for industrial workers, and carrying heavy loads in rough terrain.
Today, prostheses and exoskeletons are controlled using electromyography. In other words, by recording the electrical activity in muscles as they contract. It’s neither intuitive nor human-like, and it really only shows the brain’s intent, not the reality of what the muscle is doing.
After embedding pairs of 3mm diameter ball magnets into the calves of turkeys, the researchers were able to detect muscle movement in three milliseconds, and to the precision of thirty-seven microns, which is about the width of a human hair. They hope to try MM on humans within the next couple of years. It would be a great solution overall if it works out, because compared with the electromyography method, MM is cheaper, less invasive, and potentially permanent. Couple MM with a new type of amputation surgery called AMI that provides a fuller range of motion, less pain overall, and finer control of prosthetics, and the future of prostheses and rehabilitation looks really exciting. Be sure to check out the video after the break.
At this point in time, one would be hard pressed to find anyone who is not at least aware of some of the uses of exoskeletons as they pertain to use by humans. From supporting people during rehabilitation, to ensuring that people working in industrial and warehouse settings do not overexert themselves, while also preventing injuries and increasing their ability to carry heavy loads without tiring.
During the recovery mission of the Chang’e 5 sample container in the rough terrain of Inner Mongolia, the crew which was tasked with setting up the communications center, electrical supply systems and other essential services in the area wore exoskeletons. Developed by a relatively new Chinese company called ULS Robotics (see embedded promotional video after the break), the powered exoskeletons allowed the crew to carry 50 kg loads at a time for a hundred meters across the rough, snowy terrain.
The obvious benefit of an exoskeleton here is that while humans are pretty good at navigating rough terrain, this ability quickly degrades the moment a heavy load is involved, as anyone who has done serious mountain trekking can probably attest to. By having the exoskeleton bear most of the load, the wearer can focus on staying upright and reaching the destination quickly and safely.
With the growing interest for exoskeletons from various industries, the military, as well as the elderly, it probably won’t be too long before we’ll be seeing more of them in daily life the coming years.
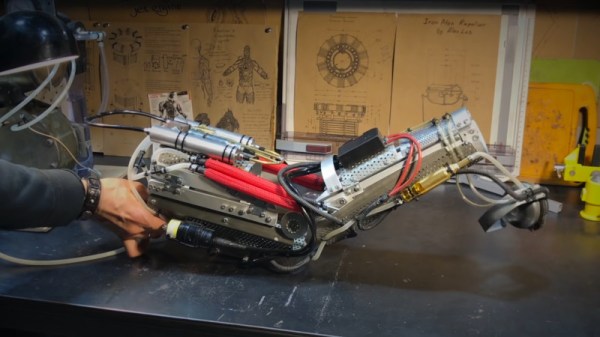
The idea of building a suit that increases the wearer’s strength is a compelling one, often featured in science fiction. There are a handful of real world examples, and [Alex] can now add his to the list. The build comes with a twist however, relying on hydrogen to do the work.
At its heart, the build is not dissimilar to other artificial muscle projects. The muscles in [Alex’s] build consist of a rubber tube inside a nylon braid. When the rubber tube is inflated, it expands, causing the nylon braid to shorten as it grows wider. Commonly, such builds rely on compressed air to power the muscles, however [Alex] took a different path. Instead, water is electrolysed in a chamber designed to look like Iron Man’s arc reactor, with the resulting gases produced being used to drive the muscles. With five muscles ganged up to pull together, the wearable arm support is capable of generating up to 15 kg of pull force.
It’s a design that has a few benefits; the electrolyser has no moving parts, and is much simpler and quieter than a typical air compressor. Obviously, there is a risk of fire thanks to the flammable gases used, but [Alex] explains the precautions taken to minimise this risk in the video.
Exosuits may not be mainstream just yet, but that doesn’t mean people aren’t working to make them a reality. We’ve featured a few before, like this open-source design. Video after the break.
Tech history is rife with examples of bizarre product demos, but we’ve got to think that Elon Musk’s Neuralink demo this week will have to rank up there with the weirdest of them. Elon’s job here was to sell the proposition that having a quarter-sized plug removed from your skull by a surgical robot and having it plunge 1,024 tiny wires into your gray matter will be totally normal and something that all the cool kids will be doing someday. We watched the 14-minute supercut of the demo, which went on for considerably longer than that due to the realities of pig wrangling, and we remain unsold on the technology. Elon selling it as “a Fitbit in your skull, with tiny wires” probably didn’t help, nor did the somewhat terrifying appearance of the surgical robot needed to do the job. On the other hand, Gertrude the Bionic Pig seemed none the worse for her implant, which was reportedly wired to her snout and sending data wirelessly. The demonstration of reading joint positions directly from the brain was honestly pretty neat. If you want to dive deeper into Neuralink, check out Maya’s great article that separates fact from science fiction.
Jerry Carr, NASA astronaut and commander of the third and final crewed Skylab mission, passed away this week at the age of 88. Carr’s Skylab 4 mission was record-breaking in 1974, with the three astronauts living and working in the orbiting workshop for 84 days. The mission contributed a vast amount of information on space medicine and the human factors of long-duration spaceflight. Carr retired from NASA in 1977 and had a long career as an engineer and entrepreneur. It’s sad to lose yet another of the dwindling number of heroes remaining from NASA’s manned-flight heyday.
Speaking of spaceflight, the closest most of us DIYers can get to space is likely courtesy of a helium-filled balloon. If you’ve ever considered sending something — or someone — aloft, you’ll find this helium balloon calculator an invaluable tool. Just plug in the weight of your payload, select from a few common balloon sizes, and the calculator will tell you how many you need and how much gas it will take to fill them. It’s got a second section that tells you how many more balloons it’ll take to get to a certain altitude, should merely getting off the ground not be enough for you.
If 2020 has proven anything, it’s that time is, at best, a negotiable concept. Improbably, September is only a day away, after an August that somehow took forever to go by in the blink of an eye. With that in mind, October is OSHWA’s Open Hardware Month, with this year’s theme being “Label and Certify”. We’re a little bit in love with the Open Hardware Facts generator, which takes your open-source hardware, software, and documentation license and generates a USDA “Nutrition Facts”-style label for your product. They’ve also added tools to make it easier to get OSHWA certification for your project.
And finally, what would it be like to pilot a giant exoskeleton? Like, a 9,000 pound (4,100 kg), quadrupedal all-terrain beast of a mech? Turns out you can (theoretically) find out for yourself courtesy of Furrion Exo-Bionics and their monster mech, dubbed Prosthesis. The machine has been in development for a long time, with the vision of turning mech racing into the next big thing in sports entertainment. Their Alpha Mech Pilot Training Program will allow mere mortals to learn how to pilot Prosthesis at the company’s proving ground in British Columbia. Details are sparse, so caveat emptor, but it sure looks like fun.
Humans make walking look simple, but of course that’s an illusion easily shattered by even small injuries. Losing the ability to walk has an enormous impact on every part of your day, so rehabilitative advances are nothing short of life-changing. The Open Exosuit for Differently Abled project is working feverishly on their Hackaday Prize entry to provide a few different layers of help in getting people back on their feet.
We’ve seen a number of exosuit projects in the past, and all of them struggle in a few common places. It’s difficult to incorporate intuitive user control into these builds, and quite important that they stay out of the way of the user’s own balance. This one approaches those issues with the use of a walker that both provides a means of steadying one’s self, and facilitates sending commands to the exosuit. Using the OLED screen and buttons incorporated on the walker, the user can select and control the walking, sitting, and standing modes.
The exoskeleton is meant to provide assistance to people with weakness or lack of control. They still walk and balance for themselves, but the hope is that these devices will be an aid at times when human caregivers are not available and the alternative would be unsteady mobility or complete loss of mobility. Working with the assistive device has the benefit of continuing to make progress in strengthening on the march to recovery.
The team is hard at work on the design, and with less than two weeks left before the entry deadline of the 2020 Hackaday Prize, we’re excited to see where the final push will bring this project!