“Know your enemy” is the essence of one of the most famous quotes from [Sun Tzu]’s Art of War, and it’s as true now as it was 2,500 years ago. It also applies far beyond the martial arts, and as the world squares off for battle against COVID-19, it’s especially important to know the enemy: the novel coronavirus now dubbed SARS-CoV-2. And now, augmented reality technology is giving a boost to search for fatal flaws in the virus that can be exploited to defeat it.
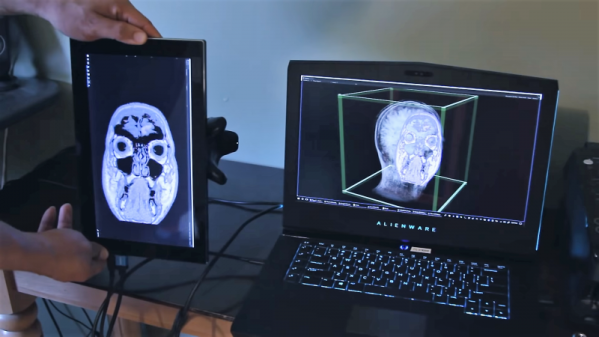
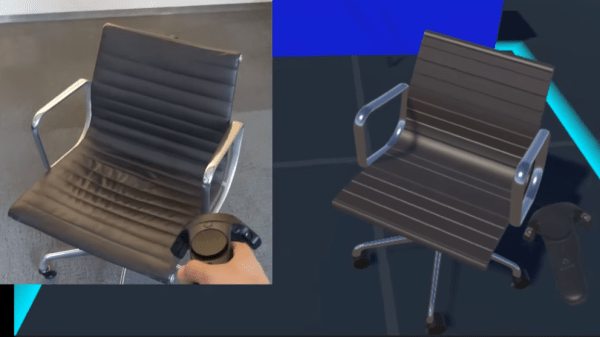
The video below is a fascinating mix of 3D models of viral structures, like the external spike glycoproteins that give coronaviruses their characteristic crown appearance, layered onto live video of [Tom Goddard], a programmer/analysts at the University of California San Francisco. The tool he’s using is called ChimeraX, a molecular visualization program developed by him and his colleagues. He actually refers to this setup as “mixed reality” rather than “augmented reality”, to stress the fact that AR tends to be an experience that only the user can fully appreciate, whereas this system allows him to act as a guide on a virtual tour of the smallest of structures.
Using a depth-sensing camera and a VR headset, [Tom] is able to manipulate 3D models of the SARS virus — we don’t yet have full 3D structure data for the novel coronavirus proteins — to show us exactly how SARS binds to its receptor, angiotensin-converting enzyme-2 (ACE-2), a protein expressed on the cell surfaces of many different tissue types. It’s fascinating to see how the biding domain of the spike reaches out to latch onto ACE-2 to begin the process of invading a cell; it’s also heartening to watch [Tom]’s simulation of how the immune system responds to and blocks that binding.
It looks like ChimeraX and similar AR systems are going to prove to be powerful tools in the fight against not just COVID-19, but in all kinds of infectious diseases. Hats off to [Tom] and his team for making them available to researchers free of charge.
Continue reading “Augmented Reality Aids In The Fight Against COVID-19”