[Sittiphol Phanvilai]’s multitouch screen project was posted a couple different places today. It uses the Nokia N95 to track light pens and draws the resulting paths on the video output. We immediately saw the applications for this in laser tagging. Right now if you want to do laser tagging you need to haul a laptop with you in addition to the projector. With some modification to the NeuScreen software you could replace the laptop with just cellphone plugged directly into the projector.
Day: June 13, 2008
Multiband Nixie VU Meter
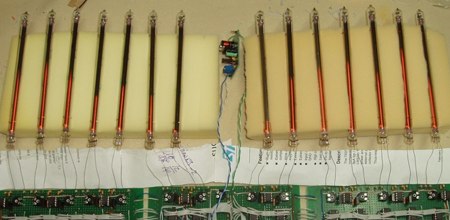
This VU meter project by [Daniel Naito] is a great piece of Russian electrocouture. It’s made up of 14 Nixie tubes that display seven frequency bands for the two audio channels. He found this similar project, but wanted to keep the cost low by avoiding such exotic ICs. First, the two input channels are amplified and then split using seven bandpass filters covering 60, 150, 400, 1000, 2500, 6000, and 15000Hz. Then, the AC audio is converted to DC. The final stage converts the logarithmic scale to a linear output. Besides the semirare Nixie tubes, the majority of the parts are just cheap opamps and comparators. The post is an excellent read and you can see it in action in the video below.
UPDATE: Yep, it’s a repost. I’m awesome like that. The True RMS Plasma Vu-meter seems to be new to us though.
UPCB Makes Your Arcade Stick Universal

The Universal PCB project lets you make any controller (specifically arcade sticks) console agnostic. A PIC microcontroller is used to translate between the button presses and the signals for the specific console you’re connected to. It uses a DB15 for the external plug. The PIC knows which console you’re plugged into based on which pins are high or low in your console specific adapter cable. The board includes a piggyback plug so you can plug in an Xbox360 controller board (like the one above) since the console requires authentication. The PIC’s firmware is conveniently upgradeable over the USB cable.
Wearable Haptic Devices Bestow Sixth Senses
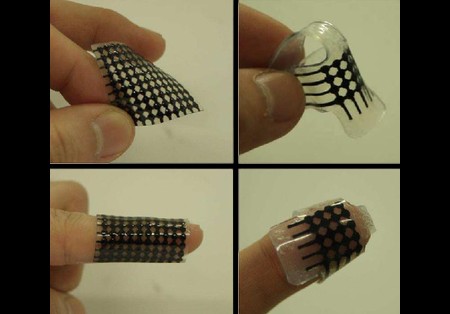
Engadget recently posted a story about a flexible tactile display that can be wrapped around any part of the body and give haptic feedback to the user. The research team from Korea’s Sungkyunkwan University that developed the device are focusing on applications like Braille for the visually impaired or transmitting tactile data to a remote user, but this is just the beginning; the applications for wearable haptic feedback are wide open.
Continue reading “Wearable Haptic Devices Bestow Sixth Senses”
Wii Fit World Of Warcraft
[youtube=http://www.youtube.com/watch?v=ucEV7N0N9Pw&hl=en]
By now you’ve probably seen the video of two researchers from the German Research Center for Artificial Intelligence (DFKI) navigating through maps on Google Earth by using the Wii Fit Balance Board. They’ve gone even further now by using the board to navigate World of Warcraft. It’s obvious that the board is usable with any 3D environment. The hack is entirely software based, as the board is completely unmodified. It relays data to a laptop via Bluetooth, where the pressure data in converted to directional instructions by their custom app written in C#. No notes on the project are available on DFKI’s site, but we’re betting they’ll release the software to the public once all the kinks are worked out.
[via Balance Board Blog]
3 Wire LCD Display
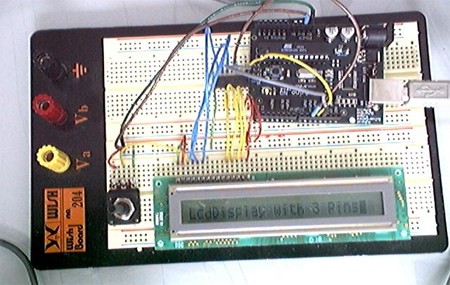
Normally driving an LCD requires seven connections to pins on the display, but by using a shift register, [Phillip Warner] at Arduino Playground was able to drive an LCD using only 3 wires. The method is cheaper than a serial LCD, but you’ll mainly save yourself a lot of effort and time by using it.
[Warner] used a HEF4094 chip to group the lines together and a variable resistor to control the contrast. A zip file with the requisite code to make this work can be found in the post.
[via YourITronics]
Water Runner Robot

Researchers at Carnegie Mellon University’s NanoRobotics Lab have developed a robot that is capable of running on the surface of a pool of water. Like their wall climbing Waalbot, the Water Runner was inspired by the abilities of a lizard, in this case, the basilisk. The team studied the motions of the basilisk and found morphological features and aspects of the lizard’s stride that make running on water possible. Both the lizard and the robot run on water by slapping the surface to create an air cavity like the one above, then push against the water for the necessary lift and thrust. Several prototypes have been built, and there are variants with 2 or 4 legs and with on and off-board power sources. You can see a slow motion video of the robot’s movement below.
The purpose of their research is to create robots that can traverse any surface on earth and waste less energy to viscous drag than a swimming robot would. Though another of the team’s goals is to further legged robot research, the Water Runner is not without potential practical applications. It could be used to collect water samples, monitor waterways with a camera, or even deliver small packages. Download the full abstract in PDF format for more information.









