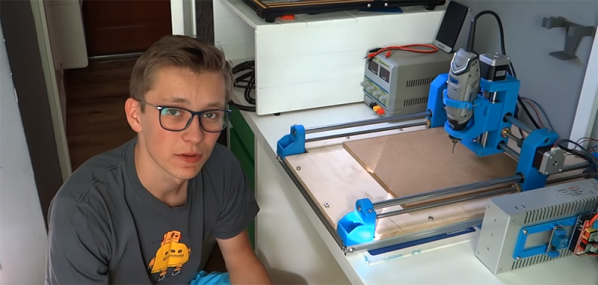
Now that 3D printers are everywhere, electronics are cheap, and open source software is extremely capable, just about anyone can build a CNC machine. That’s exactly what [Nikodem] did by turning a Dremel tool into an extremely capable CNC machine that’s able to cut MDF and acrylic and can engrave aluminum.
The electronics for the build are just an Arduino Uno, a motor driver sheld running GRBL, a relay for the Dremel, a few motor drivers, and a big ‘ol 30 A power supply. The build uses NEMA 17 motors, two on the Y-axis and one each on the X and Z. The CNC has a fantastically strong frame despite the 3D printed parts. It is constructed out of aluminum extrusion, with the carriages riding on some nice straight rods.
As for how well this CNC machine works, it’s pretty good. With the Gcode to cut an 80mm diameter circle out of MDF, this machine managed to cut a circle that was 80.02 mm in diameter. That’s pretty good, and getting into the territory that the error is probably in the cheap set of calipers, not the finished part itself. It’s an awesome build, and [Nikodem] has everything documented in his four-part video series. You can check the end of that out below.

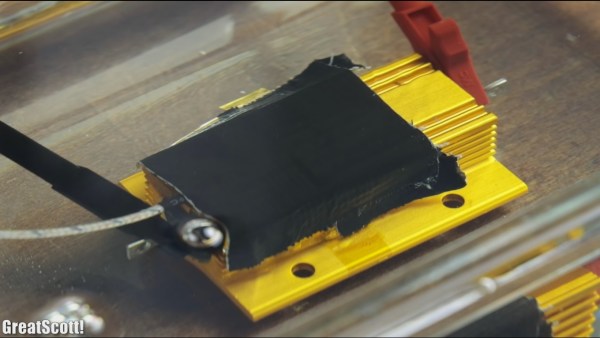
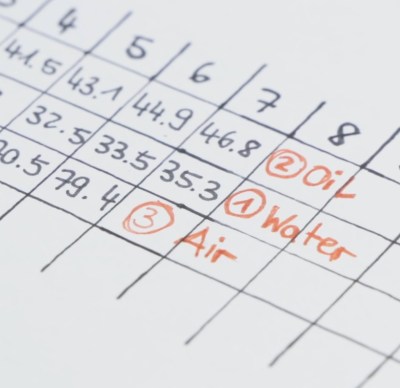 He started with testing canola oil but found that it breaks down from contact with air and becomes rancid. So he purchased some transformer oil. First, testing its suitability for submerging circuits, he found that he couldn’t see any current above his meter’s 0.0 μA limit when applying 15 V no matter how close together he brought his contacts. At 1 cm he got around 2 μA with 230 VAC, likely from parasitic capacitance, for a resistance of 115 Mohm/cm.
He started with testing canola oil but found that it breaks down from contact with air and becomes rancid. So he purchased some transformer oil. First, testing its suitability for submerging circuits, he found that he couldn’t see any current above his meter’s 0.0 μA limit when applying 15 V no matter how close together he brought his contacts. At 1 cm he got around 2 μA with 230 VAC, likely from parasitic capacitance, for a resistance of 115 Mohm/cm.








