If you’ve ever wanted to operate your own nuclear reactor, you probably aren’t going to get one in your backyard shop. However, thanks to the University of Manchester, you can get a simulated one in your browser. The pressurized water reactor looks realistic and gives you controls that — we are fairly sure — are greatly simplified compared to the real thing.
We suggest you start with the tour before you start unless, you know, you’ve operated a reactor before. You have to balance the control rods, the coolant pumping, and the steam output to produce as much power as possible without melting the core.
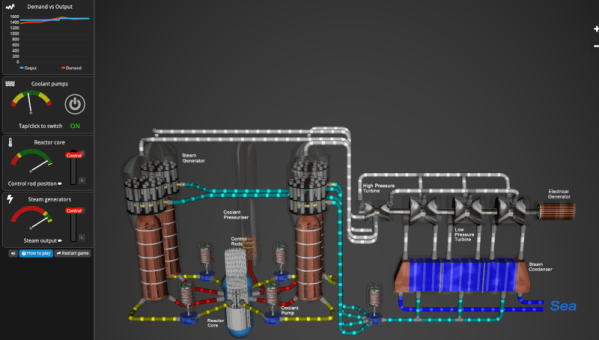
If the reactor were real, the pressure vessel would weigh as much as two 747 jets! Despite the high-tech, the business end is a conventional steam generator. The only difference is that the steam is made by the heat of the nuclear reaction instead of by burning coal or gas.
To operate the reactor, you’ll turn on the coolant pumps and wait for the high-pressure liquid to reach 290 C. In real life, this takes about 8 hours, but lucky for us, the simulation is sped up. Once you reach the right temperature, you can lift the control rods to start generating heat. This will let you adjust the steam output to try to match the demand at any given time. But if you go out of bounds, the reactor will helpfully shut down. Of course, that doesn’t help your score.
We don’t know how realistic it is, but we do know Homer Simpson probably has fewer shutdowns than we do. There are different types of reactors, of course. Operating them may be difficult, but creating fuel for them is no simple task, either. Just maybe put out your candles before you start playing.