Apparently you all love lasers just as much as we do. We put out a challenge to use, build, or otherwise abuse our favorite coherent light sources, and you responded. Some of the projects had been in the works for quite a while and were ridiculously polished, some were whipped together on the fly just for the contest, and we truly enjoyed both.
We only have three $150 DigiKey gift certificates to give out, though, so without further ado, we present to you…
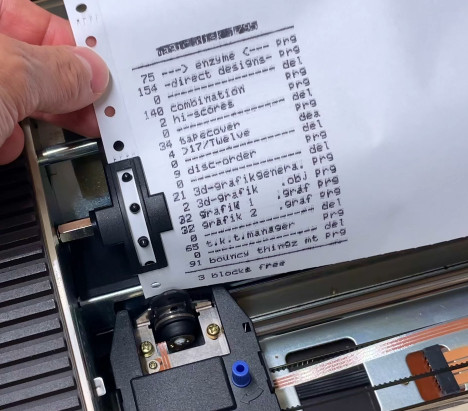
Norton was always a PC company — Norton Commander, the file manager that launched a thousand clones, was only ever available for DOS, like the rest of the company’s offerings in those days. If they’d decided to port it to the C64, though, it would likely look a lot like [retro3872809] aka [Chicken 64]’s Multi Floppy Commander with Turbo, available on GitLab.
As you might be able to see on the screen shot above or in the demo video below, the application provides an 80-column interface with a split view to show a pair of floppies side-by-side. Not that you’re limited to two floppies, however. The software is happy to swap between all the drives on the bus, to the C64’s maximum of four. All four drives will be usable since the file manager lives on a cartridge.
All drive models are supported, though not all have turbo. As a file manager, it looks like it has the normal functionality you’d expect: renaming, copying, moving and deleting files and directories. You can also launch programs or print disk listings, assuming you have a printer attached to your Commodore.
You may have a 4K television. Perhaps you have even bought an 8K screen, despite the shortage of things worth watching in 8K. A 16K display is, today, a rarity. But even when those eventually become commonplace, yours probably will not cover 14,900 square meters, rise 73 meters into the air, or wrap over your head and behind your peripheral vision.
That is approximately what happens inside Sphere in Las Vegas. The venue’s interior display is quoted as having a resolution of 16K by 16K and an area of 160,000 square feet, or about 3.7 acres. Unlike most enormous movie screens, it is not illuminated by a projector. The entire surface is a direct-view LED display: an immense, curved video wall assembled from tens of thousands of smaller pieces.
After seeing The Wizard of Oz at Sphere, however, the most interesting part was not simply the screen’s size. It was how thoroughly the screen could disguise itself.
Where Did The Theater Go?
Radio City or the Sphere? (It is the Sphere; photo courtesy [DP])Before the presentation began, the auditorium appeared to have a conventional architectural ceiling. Great orange ribs curved over the seating, while ventilation grilles, suspended loudspeakers, lighting fixtures, curtains, and video monitors completed the illusion. It looked like the Radio City Music Hall’s proscenium. Then the show started — and the apparent theater completely disappeared. The speakers, the TVs, even the stage.
The obvious first conclusion was that the LED surface must be optically transparent, allowing the audience to see the real roof behind it until the pixels illuminated. That explanation was attractive because Sphere’s audio system really is installed behind the display, and the surface must allow sound through it.
It was also, apparently, wrong. The only explanation that makes sense is that the ceiling, ribs, grilles, speakers, and monitors were already being displayed by the screen. It was like a holodeck impersonating a physical theater interior. When the Oz material began, the system simply replaced one complete visual environment with another.
That’s what happens when a display fills nearly all of your useful visual field. A normal screen announces itself with a bezel, a wall, or at least a clearly visible edge. Sphere’s display extends upward and around the audience, removing many of those references. Give the image credible perspective, texture, shadows, and familiar architectural details, and the brain accepts the pixels as a room.
The same effect makes the Oz landscapes seem less like scenes displayed in front of the audience and more like places into which the auditorium has been inserted. Of course, there are more special effects. For The Wizard of Oz, there is wind and smoke, along with paper leaves, flower petals, and foam-rubber apples that fall from the sky. All of this makes it even more immersive.
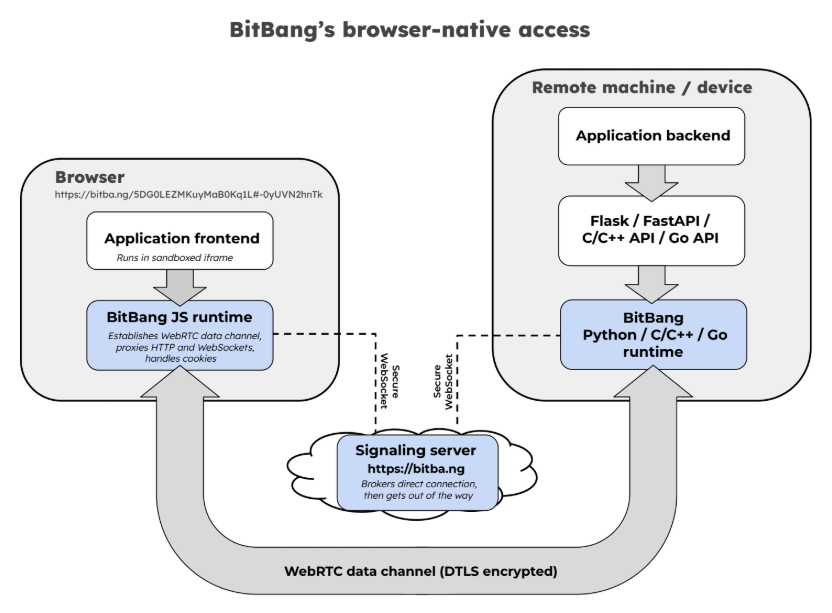
Launch a single static binary executable, send someone a QR code or URL (or failing that, text a numerical code or shout it across a room), and they’ll get an encrypted terminal in their browser. No VPN, no port forwarding, no firewall modifications, and no account setup required. It’s BitBang by [Rich LeGrand], and there is a lot to go through in this one.
The best part? It’s not actually limited to just firing off a terminal. It’s a whole open framework for establishing an encrypted peer-to-peer connection between two systems over WebRTC without needing either a trusted central authority, or any special network configuration.
The signaling server brokers the handshake, then has no further involvement. By design, it couldn’t see application data even if it wanted to. Click to enlarge.
Opening a remote terminal, transferring files, or accessing web apps on a remote machine’s network is done with bitbang-cli, an implementation of BitBang focused on providing simple, zero-config remote access.
Before we go on, we want to mention that BitBang does require a lightweight, trustless signaling server only to broker the initial connection, but more on that in a moment.
On the machine to be shared, one first downloads the binary. Easiest way to do that is to go to bitba.ng and download manually, or copy and paste the one-line installer to auto-detect one’s system, download the correct release, and verify the checksum.
After the binary is downloaded, simply run it in a terminal and receive a QR code to scan, a URL to copy & paste, or a numerical code if those are inconvenient. On the remote side, one accesses the signaling server and the connection is made — one gets a terminal on the target machine open in the browser tab, with added options for file sharing and accessing web applications on the target network.
The signaling server isn’t involved in authentication or encryption, and couldn’t see private data between the two ends even if it wanted to. Prefer not to use someone else’s regardless? Run your own local instance with bitbang-server.
It includes not just the remote-access tool mentioned above, but also a BitBang Octoprint plugin for cloud-free remote access to 3D printers, and bitbang-python is a library for turning local Python web applications into a URL that can be opened from anywhere.
We’re sure some of you are getting more than a few ideas from this. If it lets you bring a project over the finish line, let us know on our tips line.
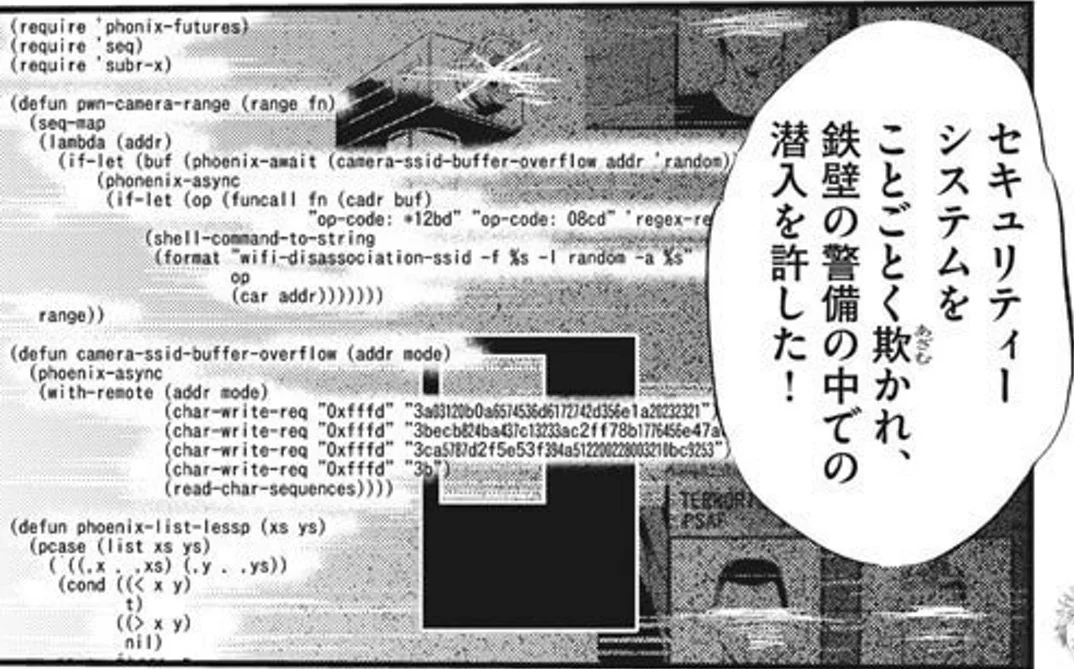
Emacs is one of the big classic text editors, right up there next to vi. It’s famous for its interface and its ubiquity across the *nix world. It’s such a core piece of software in the coding world that it has showed up a fair few times in popular culture—and [Ian Y.E. Pan] has collated some of those appearances.
Emacs played a role in The Social Network, the retelling of the origin story of Facebook (the social network everybody used to use). Notably, Mark Zuckerberg used the tool to slap together a script for scraping a website. It also appears in Tron: Legacy, Arctic Blast, and the tech TV comedy Silicon Valley—more than once, in fact.
Other appearances include comics, Japanese anime series Key The Metal Idol, and a few miniseries and documentaries to boot.
[Ian]’s list is unlikely to be exhaustive. Both because he hasn’t seen every movie or TV show ever made, and because you can make new content featuring Emacs references tomorrow if you so desire. Still, it’s fun to see some of the famous properties that have featured good ol’ Emacs.
Don’t hesitate to let us know if you happen to put together a similar list about vi. The tipsline is waiting.
As easy as it is to make a late 1980s-style game console using a modern microcontroller, there’s arguably more fun in doing things the traditional way. This is the challenge that [Throaty Mumbo] took upon himself when he embarked on his retro game console project, called simply the Game Console V2.
In the accompanying video the development process and other details are covered and demonstrated. Most notable perhaps are the proper cartridges with ROMs on a parallel bus rather than something like SD cards, and the absence of any modern ports including even VGA. This means only composite AV output like in the good old days of RF splitters and other assorted fun.
The NTSC output signal is generated by an RP2350 MCU in the form of the PGA-shaped PGA2350 breakout board that’s wired into a 6-bit R-2R network for RGB332 output via the RCA jack, while audio is fed into a PCM5102A I2S DAC. For controllers you get 4-pin Bulgin SA2367 connectors and an N64-compatible protocol.
It’s noted that the use of an RP2350B MCU is temporary, as the goal with the V3 version of the project is to take it into a proper 8- or 16-bit CPU direction. We’re certainly looking forward to seeing this next revision of what looks to be a pretty interesting game console.
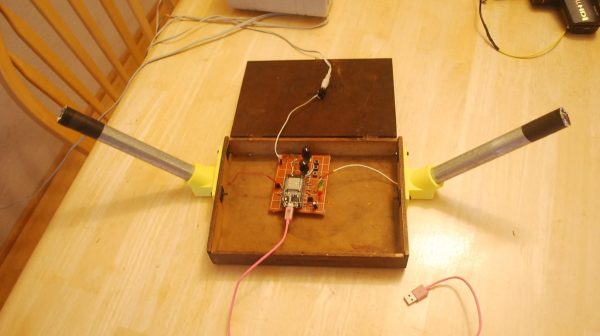
The Theremin is that classic electronic musical instrument that makes those weeee-ohhhhh noises which were so popular in mid-century science fiction movies. Mid-last-century, that is, because this century is just beginning. In any case, you could build one with old-school analog electronics, or you could go a more modern route, as [ericCycles] did.
The build relies almost entirely on an ESP32 microcontroller with minimal supporting circuitry. Like any other Theremin, pitch and volume are controlled by moving hands closer or farther away from two antenna. In this case, the ESP32 uses its capacitive touch circuitry to detect effectively detect hand proximity to the two antenna in question, and uses those values to control the pitch and volume of a synthesized waveform. That waveform is then pumped out over the onboard digital-to-analog converter for playback on external speakers.
If you want to build a simple Theremin-like instrument quickly and easily, it’s hard to beat the simplicity on offer here. We’ve featured some other fun variants over the years, too, like this version that uses time-of-flight sensors for the human interface.