Whether you care to admit it or not, hair is important to self-image, and not being able to deal with it yourself feels like a real loss of independence. To help people with limited mobility, researchers at MIT CSAIL have created a hair-brushing robot that combines a camera with force feedback and closed-loop control to adjust to any hair type from straight to curly on the fly. They achieved this by examining hair as double helices of soft fibers and developed a mathematical model to untangle them much like a human would — by working from the bottom up.
 It may look like a hairbrush strapped to a robot arm, but there’s more to it than that. Before it ever starts brushing, the robot’s camera takes a picture that gets cropped down to a rectangle of pure hair data. This image is converted to grayscale, and then the program analyzes the x/y image gradients. The straighter the hair, the more edges it has in the x-direction, whereas curly hair is more evenly distributed. Finally, the program computes the ratio of straightness to curliness, and uses this number to set the pain threshold.
It may look like a hairbrush strapped to a robot arm, but there’s more to it than that. Before it ever starts brushing, the robot’s camera takes a picture that gets cropped down to a rectangle of pure hair data. This image is converted to grayscale, and then the program analyzes the x/y image gradients. The straighter the hair, the more edges it has in the x-direction, whereas curly hair is more evenly distributed. Finally, the program computes the ratio of straightness to curliness, and uses this number to set the pain threshold.
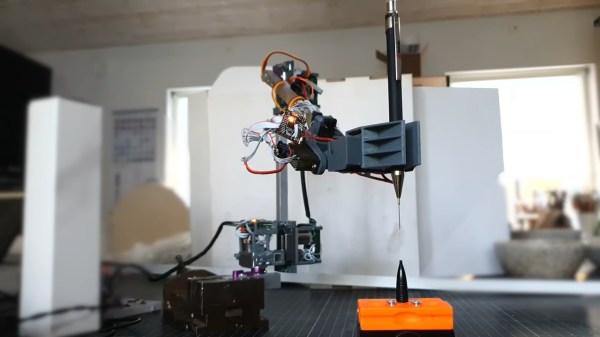
The brush is equipped with sensors that measure the forces being exerted on the hair and scalp as it’s being brushed, and compares this input to a baseline established by a human who used it to brush their own hair. We think it would be awesome if the robot could grasp the section of hair first so the person can’t feel the pull against their scalp, and start by brushing out the ends before brushing from the scalp down, but we admit that would be asking a lot. Maybe they could get it to respond to exclamations like ‘ow’ and ‘ouch’. Human trials are still in the works. For now, watch it gently brush out various wigs after the break.
Even though we have wavy hair that tangles quite easily, we would probably let this robot brush our hair. But this haircut robot? We’re not that brave.
Continue reading “MIT’s Hair-Brushing Robot Untangles Difficult Robotics Problem”