In 1988, a bunch of engineers from Hotzenwald, Germany, came together and decided that it is time for the future of mobility: A new, more modern and environmentally friendly car should put an end to fossils and emissions while still being fun to drive. “It should become a new kind of car. Smaller, lighter, cleaner – and more beautiful” is how future CEO Thomas Albiez described his mission. For the first time in automotive history, this series car would be designed as an all-electric vehicle from the start and set a new standard for mobility. The project was given the codename “Hotzenblitz” (“Hotzen Bolt”) to indicate how the idea came to them: Like a lightning bolt. The snarky regional term also came with a double meaning: Imaginary lightning bolts, used for insurance fraud.
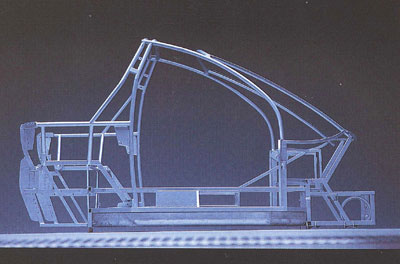
Unnoticed by the rest of the world, they founded Hotzenblitz Mobile. Industrial Designer Harold Schurz was contracted to design the chassis for the Hotzenblitz, which was then modeled into a prototype chassis. The self-funded team moved fast. An external motorsports company helped to develop the tubular steel frame, and soon their vision took on shape. After the team had fitted a motor and transmission into the frame, CEO Thomas Albiez himself installed the traction battery and drive train. The team felt confident with the result, and in July 1990, during an open house day in the office, they somewhat spontaneously decided to call Green Tech entrepreneur and chocolate mogul Alfred Ritter.
Alfred Ritter had experienced financial losses after the Chernobyl Disaster. Many agricultural regions, including several hazelnut plantations that were vital to Alfred’s chocolate business, were irreversibly lost to the fallout contamination. It was then when he turned to the green energy business, founding the Paradigma group to manufacture solar collector systems and pellet heaters. When Thomas and the team called, Alfred jumped on the idea of an electric car. In the same year, Alfred Ritter and his sister Marli Hoppe-Ritter became shareholders in the company and helped to finance the future of the Hotzenblitz.
Continue reading “EV History: The Lightning Precedes The Thunder”