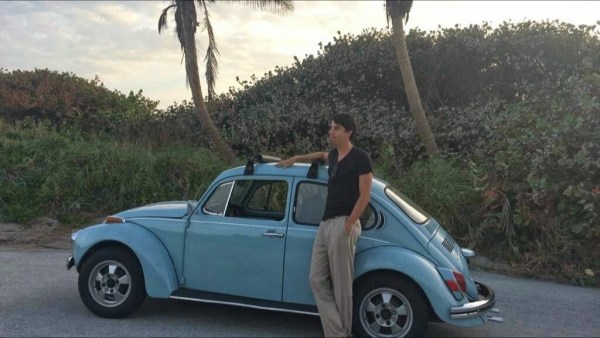
If you build a better mousetrap, the world will beat a path to your door. Of course it helps if your mousetrap is reliable, simple, cheap, and easy to work on. In the car world, look no further than arguably the most successful, and most hackable, car in history: the Volkswagen Type 1, more commonly known as the Beetle. The ways in which this car was modified to suit the needs of a wide range of people over its 65-year-long production run proves that great design, ease of use, and simplicity are the keys to success, regardless of the project or product.
Built by Ferdinand Porsche in 1930’s Germany, the Beetle was designed to be a car for anyone and everyone. Its leader at the time wanted a true “people’s car” (i.e. “Volkswagen”) that was affordable for a German family, could reliably travel at sustained highway speeds on the new German autobahns, and easily be repaired by its owners. The car features an air-cooled engine for simplicity and cost savings: no radiator, water pump, or coolant, plus reduced overall complexity. The engine can be easily removed by disconnecting the fuel line, the throttle cable, and the four bolts that hold it to the transaxle. The entire body is held on to the chassis by eighteen bolts and is also easy to remove by today’s standards. There’s no air conditioning, no power steering, and a rudimentary heater of sorts for the passenger cabin that blows more hot air depending on how fast the engine is running. But possibly the best example of its simplicity is the fact that the windshield washer mechanism is pressurised with air from the over-inflated spare tire, eliminating the need to install another piece of equipment in the car.
It’s not too big of a leap to realize how easily hackable this car is. Even Volkswagen realized this and used the platform to build a number of other vehicles: the Type 2 (otherwise known as the bus, van, hippie van, Kombi, etc.) the eclectic Karmann Ghia, and the Types 3 and 4. Parts of the Type 1 were used to build the Volkswagen 181, commonly referred to as “the Thing”. Ferdinand Porsche also used design elements and other parts of the Type 1 to build the first Porsche, essentially making a souped-up Beetle. The rear-engine, rear-wheel drive layout of modern Porsches is a relic of this distant Beetle cousin. But the real magic is what people started doing to the Beetles in their backyards in the ’60s and 70s: turning them into buggies, off road machines, race cars, and hot rods that are still used today.
At some point around this time, a few people realized that the Beetle was uniquely suited to off-road racing. The type of suspension combined with the rear-engine, rear-wheel-drive layout meant that even without four-wheel drive, this car could excel in desert racing. There are still classes in this race for stock Beetles and modified Beetles called Baja Bugs.
Continue reading “Volkswagen Beetle – The Most Hackable Car” →