Most of us do our writing on computers these days, but the modern computing environment does present a lot of distractions. That’s let to the concept of the writer deck, a simplified device intended more specifically for word processing tasks. [Ashtf] has built a great example of the form with a modified version of the PocketMage device.
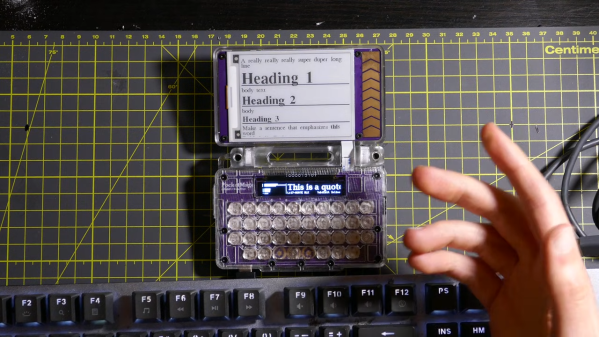
The PocketMage is a clamshell PDA device that [Ashtf] has been working on for some time. It’s powered by an ESP32, hooked up to a nice e-ink display. In its basic form, it’s not the ideal device for doing serious writing work, mostly because of its tiny keyboard. However, [Ashtf] has since added external keyboard support, which completely changes the game. With the use of a small USB C to USB A adapter, you can hook up any conventional USB keyboard that you like to best attain your maximum typing speed.
The result is a compact, simple device that lets you type away without distractions. If your latest fanfic isn’t coming along quickly enough because you keep losing focus to social media, perhaps this is a route you might like to go. [Ashtf] also included Markdown support so you can create richer documents on the device while operating in what is still fundamentally a text-only environment.
It’s neat to build custom devices that suit your own personal productivity needs. If you dig the PocketMage, you might like to check out the design files on Github. We’ve featured some other fun writer decks before, too. Video after the break.














