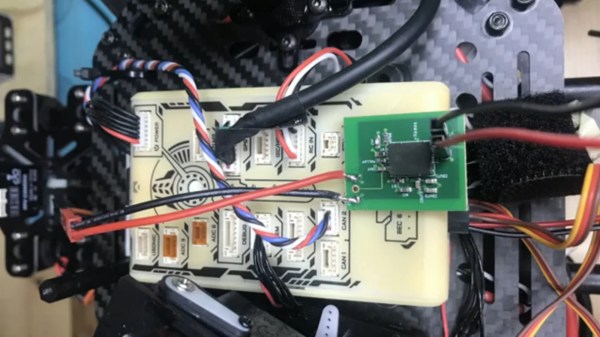
[Dirksavage88] tells us a story about developing a simple BEC in times of chip shortage. He needed a small 5V/3A regulator board for a servo rail on his drone, and decided to use one of the new integrated-inductor modules from Texas Instruments. Hardly requiring any external parts, such modules are exceptionally nice to use for all your power rail needs, albeit at a slightly increased cost – the downside is that, as the parts shortage hit, most of them have been out of stock. Originally priced at about $7 USD, the asking price for these specific modules, LMZM33603, has climbed as high as $800. Somehow, he obtained a few of these modules nevertheless, and went on designing a board.
It can be daunting to test your very first PCBs when the silicon you’re putting on it is effectively irreplaceable for your purposes. TI is known for their wacky footprints, and this module is no exception – the solder paste application took a bit of time, and seeing small solder balls around the module after reflow didn’t exactly reassure him. Thankfully, when he powered it all up, the module worked wonders, and took its rightfully earned spot in his drone’s servo turret. He says we can expect the next revision of his design in 2024, or whenever it is that the reported 100 week lead time is due. In case some of us could use them, Eagle files are available on GitHub!
Quite a few of us are lucky enough to have enough crucial parts for what we need, but most of us got a good few projects shelved until better times – take this WiFi-enabled wall charger project, for instance. Even bigger projects are suffering, from SmoothieBoard to Raspberry Pi. Just a year ago, we had our readers share their chip shortage stories.
Continue reading “Anxieties Of Hardware Bringup During Parts Shortage”