Testing any kind of project in the real world is expensive. You have to haul people and equipment around, which costs money, and if you break anything, you have to pay for that too! Simulation tends to come first. Making mistakes in a simulation is much cheaper, and the lessons learned can later be verified in the real world. If you want to learn to fly a quadcopter, the best thing to do is get some time behind the sticks of a simulator before you even purchase anything with physical whirly blades.
Oddly enough, the same goes for AI. Microsoft built a simulation product to aid the development of artificial intelligence systems for drones by the name of Project AirSim. It aims to provide a comprehensive environment for the testing of drone AI systems, making development faster, cheaper, and more practical.
Picking propeller size for any aircraft, but especially VTOLs, it’s a tradeoff between size and RPM. You can either move a large volume of air slowly or a small volume of air quickly. Small and fast tend to be the most practical for many applications, but if you’re thinking outside the box like [amazingdiyprojects], you can build a massive propeller and make it fly at just one revolution per second. (Video, embedded below the break.)
One of the challenges of large propellers is their high torque requirements. To get around this, [amazingdiyprojects] drives the 5m diameter propeller from the tips using electric motors with propellers. The blades are simple welded aluminum frames covered with heat-shrunk packing tape, braced with wires for stiffness.
The flight controller, with its own battery, is prevented from spinning with the blades by counteracting the spin of a small DC motor. Each blade is equipped with a servo-driven control surface, which can give roll and pitch control by adjusting deflection based on the blade’s radial position.
[amazingdiyprojects] control setup is very creative but somewhat imprecise. Instead of trying to write a custom control scheme, he configured the old KK2.15HC flight controller for a hexacopter. Each control servo’s PWM signal routes through a commutator disc with six sectors, one for each motor of the virtual hexacopter. This means each of the servos switches between six different PWM channels throughout its rotation. To compensate for lag when switching between channels, [amazingdiyprojects] had to tune the offset of the commutator disc otherwise it would veer off in the wrong direction. After a second test flight session to tune the flight controller settings, control authority improved, although it is still very docile in terms of response.
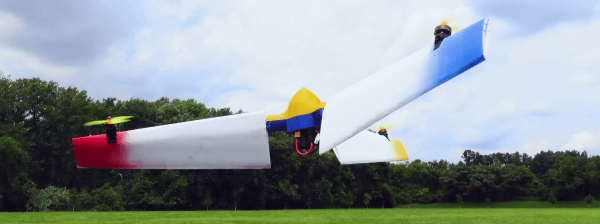
Multirotor drones are significantly more popular than conventional helicopter designs for many reasons, which do not include efficiency. Making use of the aerodynamic effects behind this, [Nicholas Rehm] was able to significantly increase the efficiency of his experimental tricopter by turning it into one large spinning propeller.
Since aerodynamic drag is proportional to velocity, a small, high-RPM propeller will require more power to produce the same thrust as a large, low-RPM propeller. With this in mind, [Nicholas] built a tricopter that can rotate all three long arms together using a single servo, giving it very aggressive yaw control. By attaching a wing to each of the arms, it becomes a large variable pitch propeller powered by tip thrusters.
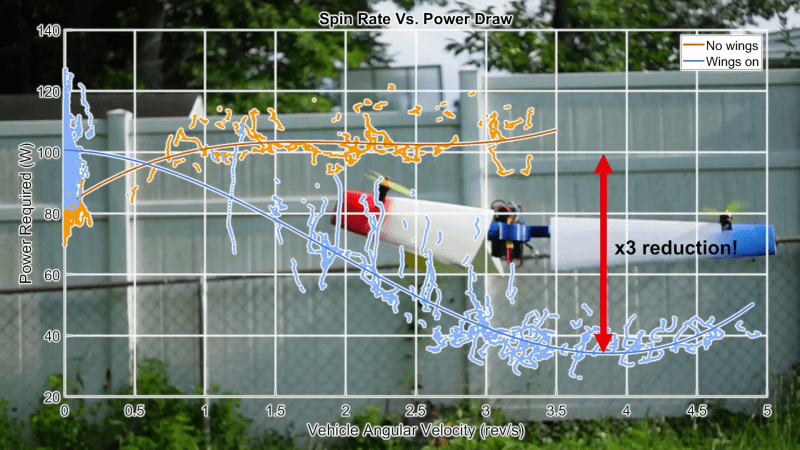
To measure the efficiency of the craft, a small lidar sensor was added to allow accurate PID altitude control. While keeping the drone at a constant altitude a few feet off the ground, [Nicholas] measured the power draw of the motors in a hover, and then let the drone spin around its yaw axis up to almost 5 rev/s.
At a spin rate of 4 rev/s, the power draw of the motors was reduced by more than 60%. Even compared to the drone without the added weight of the wings, it still used 50% less power to maintain altitude.
Since [Nicholas] hadn’t yet implemented horizontal position control while spinning, the length of each test run was limited by the wind drift. He plans to solve this, and also do some testing of the drone in horizontal flight, where the added airfoils will also increase efficiency.
We’ve featured a few of [Nicholas]’ flying machines here on Hackaday, including a foam F-35 VTOL and a cyclocopter. Most of his aircraft run his open source dRehmFlight flight stabilization, created specifically for hacking.
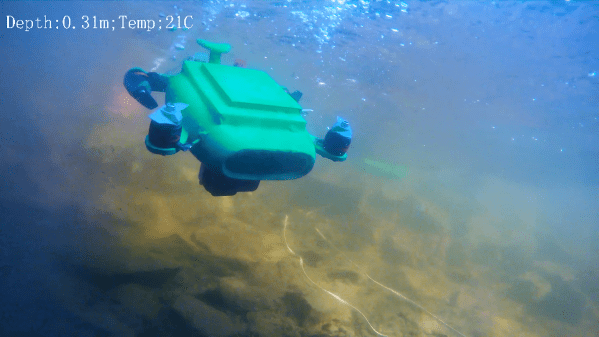
The differences between a drone and an underwater remote-operated vehicle (ROV) aren’t actually that large. Both have powerful motors that move large volumes of fluid (yes, air is a fluid), a camera, a remote, and an onboard battery. So when [RCLifeOn] got his hands on a cheap used drone, he reckoned that it could fly underwater just as well as it did in the air.
To his credit, the principle was sound, and the initial tests looked promising. However, we will spoil the ending and tell you it doesn’t work out as well as he hoped due to water leakage. He printed a case with a large panel for accessing electronics inside and an acrylic window for the camera. The panel pressed up against a gasket via the few dozen metric screws along the perimeter. Despite the design being quite whimsical, he quickly regrets the screws as getting inside is tiring on the wrists. He epoxies the hatch to the hull and drills holes to charge the battery to stop the seemingly never-ending water leaks. After its maiden journey, water got inside and fried some of the motor controllers. So for the second test run, he used what limited capabilities it had left.
Despite the project not working out how he expected, it’s a great example of how some reused parts and some 3d printing can make something entirely different. So perhaps next time, instead of throwing that broken drone away, see if it could be given just a bit of love. Possibly the propellers can be combined or make do with only three motors. Or just go the [RCLifeOn] route and make it into something new entirely.
When we think of robotics, the first thing that usually comes to mind for many of us is some sort of industrial arm that’s bolted to the floor, or perhaps a semi-autonomous rover trudging its way across the dusty Martian landscape. While these two environments are about as different as can be, the basic “rules” are pretty much the same. Being on firm ground ground gives the robot a clear understanding of its position and orientation, which greatly simplifies tasks such as avoiding collisions or interacting with nearby objects.
But what happens when that reference point goes away? How does a robot navigate when it’s flying through open space or hovering in mid-air? That’s just one of the problems that fascinates Nick Rehm, who stopped by to host this week’s Aerial Robotics Hack Chat to talk about his passion for flying robots. He’s currently an aerospace engineer at Johns Hopkins Applied Physics Laboratory, where he works on the unique challenges faced by autonomous flying vehicles such as the detection and avoidance of mid-air collisions, as well as the development of vertical take-off and landing (VTOL) systems. But before he had his Master’s in Aerospace Engineering and Rotorcraft, he got started the same way many of us did, by playing around with DIY projects.
In fact, regular Hackaday readers will likely recall seeing some of his impressive builds. His autonomous ekranoplan designed to follow a target using computer vision graced the front page in April. Back in 2020, we took a look at his recreation of SpaceX’s Starship prototype, which used a realistic arrangement of control surfaces and vectored thrust to perform the spacecraft’s signature “Belly Flop” maneuver — albeit with RC motors and propellers instead of rocket engines. But even before that, Nick recalls asking his mother for permission to pull apart a Wii controller so he could use its inertial measurement unit (IMU) in a wooden-framed tricopter he was working on.
Discussing some of these hobby builds leads the Chat towards Nick’s dRehmFlight project, a GPLv3 licensed flight control package that can run on relatively low-cost hardware, namely a Teensy 4.0 microcontroller paired with the GY-521 MPU6050 IMU. The project is designed to let hobbyists easily experiment with VTOL craft, specifically those that transition between vertical and horizontal flight profiles, and has powered the bulk of Nick’s own flying craft.
Moving onto more technical questions, Nick says one of the most difficult aspects when designing an autonomous flying vehicle is getting your constraints nailed down. What he means by that is having a clear goal of what the craft needs to do, and critically, how long it needs to do it. How far does the craft need to be able to fly? How fast? Does it need to loiter at the target location, and if so, for how long? The answers to these questions will largely dictate the form of the final vehicle, and are key to determining if it’s worth implementing the complexity of transitioning from VTOL to fixed-wing horizontal flight.
But according to Nick, the biggest challenge in aerial robotics is onboard state estimation. That is, the ability for the craft to know its position and orientation relative to the ground. While high-performance computers have gotten lighter and sensors have improved, he says there’s still no substitute for having a ground-based tracking system. He mentions that those fancy demonstrations you’ve seen with drones flying in formation and working collaboratively towards a task will almost certainly have an array of motion capture cameras tucked off to the side. This makes for an impressive show, but greatly limits the practical application of these drone swarms.
Nick’s custom Raspberry Pi 4-powered quadcopter lets him test autonomous flight techniques.
So what does the future of aerial robotics look like? Nick says open source projects like ArduPilot and PX4 are still great choices for hobbyists, but sees promise in newer platforms which pair the traditional autopilot with more onboard computing power, such as Auterion’s Skynode. More powerful flight controllers can enable techniques such as simultaneous localization and mapping (SLAM), which uses 3D scans of the environment to help the robot orient itself. He’s also very interested in technologies that enable autonomous flight in GPS-denied environments, which is critical for robotic craft that need to operate indoors or in situations where satellite navigation is unavailable or unreliable. In light of the incredible success of NASA’s Ingenuity helicopter, we imagine these techniques will also play an invaluable role in the future airborne exploration of Mars.
We want to thank Nick for hosting this week’s Aerial Robotics Hack Chat, which turned out to be one of the fastest hours in recent memory. His experience as both an avid hobbyist and a professional in the field provided exactly the sort of insight the Hackaday community looks for, and his gracious offer to keep in touch with several of those who attended the Chat to further discuss their projects speaks to how passionate he is about this topic. We expect to see great things from Nick going forward, and would love to have him join us again in the future to see what he’s been up to.
The Hack Chat is a weekly online chat session hosted by leading experts from all corners of the hardware hacking universe. It’s a great way for hackers connect in a fun and informal way, but if you can’t make it live, these overview posts as well as the transcripts posted to Hackaday.io make sure you don’t miss out.
You’d think that a synthesizer that makes as much noise and sports as many knobs as this one would have more than a dozen transistors on board. Surely the circuit behind the panel is complex, and there must be at least a couple of 555 timers back there, right?
But no, the “Box of Beezz” that [lonesoulsurfer] came up with is remarkably simple. It takes inspiration from a [Look Mum No Computer] circuit called the “Circle Drone of Doom,” which used six switchable relaxation oscillators to make some pretty cool sounds. The Box of Beezz steps that up a bit, with four oscillators in three switchable banks in the final version. Each oscillator has but one transistor with a floating base connection and a simple RC network on the collector. The sawtooth outputs of these relaxation oscillators can be adjusted and summed together, resulting in some surprisingly complex sounds. Check out the video below for a bit of the synth’s repertoire — we’d swear that there are points where we can hear elements of the THX Deep Note in there.
We poked around a bit to understand these oscillators, and it looks like these qualify as avalanche relaxation oscillators. [lonesolesurfer]’s notes indicate that SS9018 transistors should be used, but in the photos they appear to all be 2N4401s. We’re not sure how long the transistors will last operating in the avalanche mode, but if they quit, maybe some neon tubes would work instead.
When it comes to hobby rotorcraft, it almost seems like the more rotors, the better. Quadcopters, hexacopters, and octocopters we’ve seen, and there’s probably a dodecacopter buzzing around out there somewhere. But what about going the other way? What about a rotorcraft with the minimum complement of rotors?
And thus we have this unique “flying stick” bicopter. [Paweł Spychalski]’s creation reminds us a little of a miniature version of the “Flying Bedstead” that NASA used to train the Apollo LM pilots to touch down on the Moon, and which [Neil Armstrong] famously ejected from after getting the craft into some of the attitudes this little machine found itself in. The bicopter is unique thanks to its fuselage of carbon fiber tube, about a meter in length, each end of which holds a rotor. The rotors rotate counter to each other for torque control, and each is mounted to a servo-controlled gimbal for thrust vectoring. The control electronics and battery are strategically mounted on the tube to place the center of gravity just about equidistant between the rotors.
But is it flyable? Yes, but just barely. The video below shows that it certainly gets off the ground, but does a lot of bouncing as it tries to find a stable attitude. [Paweł] seems to think that the gimballing servos aren’t fast enough to make the thrust-vectoring adjustments needed to keep a stick flying, and we’d have to agree.
This isn’t [Paweł]’s first foray into bicopters; he earned “Fail of the Week” honors back in 2018 for his coaxial dualcopter. The flying stick seems to do much better in general, and kudos to him for even managing to get it off the ground.