So, GPT-4 is out, and it’s all over for us meatbags. Hype has reached fever pitch, here in the latest and greatest of AI chatbots we finally have something that can surpass us. The singularity has happened, and personally I welcome our new AI overlords.
Hang on a minute though, I smell a rat, and it comes in defining just what intelligence is. In my time I’ve hung out with a lot of very bright people, as well as a lot of not-so-bright people who nonetheless think they’re very clever simply because they have a bunch of qualifications and diplomas. Sadly the experience hasn’t bestowed God-like intelligence on me, but it has given me a handle on the difference between intelligence and knowledge.
My premise is that we humans are conditioned by our education system to equate learning with intelligence, mostly because we have flaky CPUs and worse memory, and that makes learning something a bit of an effort. Thus when we see an AI, a machine that can learn everything because it has a decent CPU and memory, we’re conditioned to think of it as intelligent because that’s what our schools train us to do. In fact it seems intelligent to us not because it’s thinking of new stuff, but merely through knowing stuff we don’t because we haven’t had the time or capacity to learn it.
Growing up and making my earlier career around a major university I’ve seen this in action so many times, people who master one skill, rote-learning the school textbook or the university tutor’s pet views and theories, and barfing them up all over the exam paper to get their amazing qualifications. On paper they’re the cream of the crop, and while it’s true they’re not thick, they’re rarely the special clever people they think they are. People with truly above-average intelligence exist, but in smaller numbers, and their occurrence is not a 1:1 mapping with holders of advanced university degrees.
Even the examples touted of GPT’s brilliance tend to reinforce this. It can do the bar exam or the SAT test, thus we’re told it’s as intelligent as a school-age kid or a lawyer. Both of those qualifications follow our educational system’s flawed premise that education equates to intelligence, so as a machine that’s learned all the facts it follows my point above about learning by rote. The machine has simply barfed up what it has learned the answers are onto the exam paper. Is that intelligence? Is a search engine intelligent?
This is not to say that tools such as GPT-4 are not amazing creations that have a lot of potential to do good things aside from filling up the internet with superficially readable spam. Everyone should have a play with them and investigate their potential, and from that will no doubt come some very interesting things. Just don’t confuse them with real people, because sometimes meatbags can surprise you.

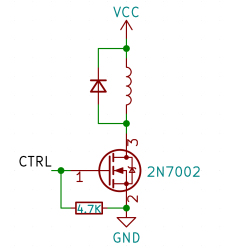 Perhaps, that’s the single most popular use for an NPN transistor – driving coils, like relays or solenoids. We are quite used to driving relays with BJTs, typically an NPN – but it doesn’t have to be a BJT, FETs often will do the job just as fine! Here’s an N-FET, used in the exact same configuration as a typical BJT is, except instead of a base current limiting resistor, we have a gate-source resistor – you can’t quite solder the BJT out and solder the FET in after you have designed the board, but it’s a pretty seamless replacement otherwise. The freewheel (back EMF protection) diode is still needed for when you switch the relay and the coil produces wacky voltages in protest, but hey, can’t have every single aspect be superior.
Perhaps, that’s the single most popular use for an NPN transistor – driving coils, like relays or solenoids. We are quite used to driving relays with BJTs, typically an NPN – but it doesn’t have to be a BJT, FETs often will do the job just as fine! Here’s an N-FET, used in the exact same configuration as a typical BJT is, except instead of a base current limiting resistor, we have a gate-source resistor – you can’t quite solder the BJT out and solder the FET in after you have designed the board, but it’s a pretty seamless replacement otherwise. The freewheel (back EMF protection) diode is still needed for when you switch the relay and the coil produces wacky voltages in protest, but hey, can’t have every single aspect be superior.