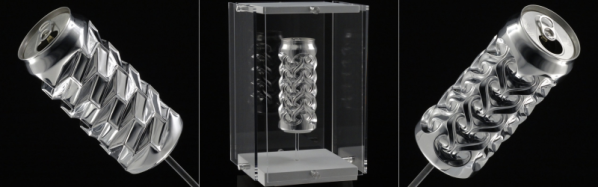
A can of soda costs about half a dollar, and once you’re done with the sugary syrup, most cans end up in the trash headed for recycling. Some folks re-use them for other purposes, but we’re guessing no one up-cycles them quite like artist [Noah Deledda] does. He turns them into pieces of Soda Can art that sell for anywhere between $2000 to $3000 a pop.
A can of soda costs about half a dollar, and once you’re done with the sugary syrup, most cans end up in the trash headed for recycling. Some folks re-use them for other purposes, but we’re guessing no one up-cycles them quite like artist [Noah Deledda] does. He turns them into pieces of Soda Can art that sell for anywhere between $2000 to $3000 a pop.
Don’t be fooled by that smashing hit in the GIF. It’s just some trick photography that [Noah] did to impress people. If you looked at the end product without the back story first, you’d think the cans were manipulated in to contorted shapes using some kind of mechanical assistance, at the very least, or probably a purpose-built machine.
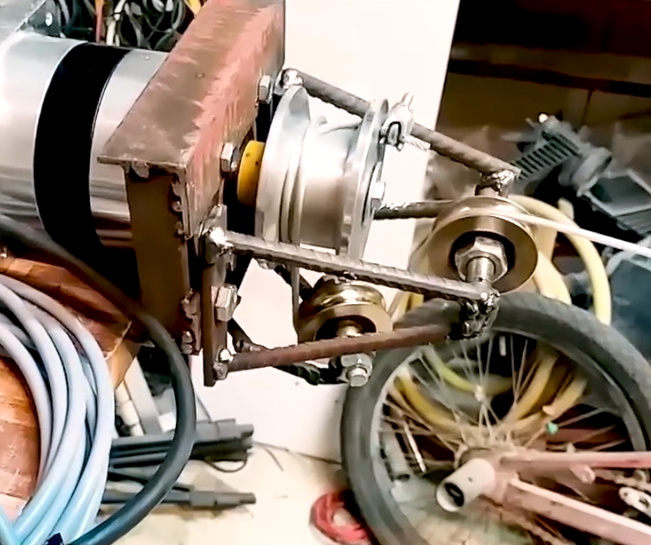
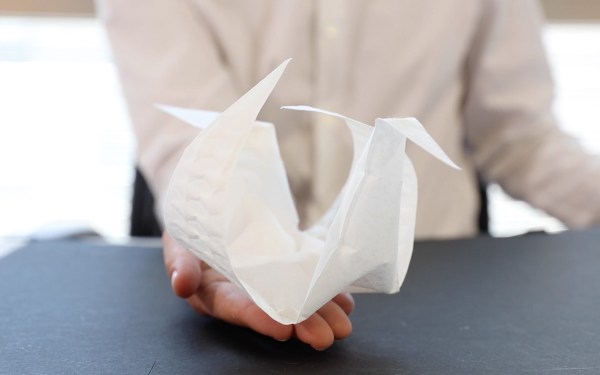
But [Noah Deledda] does it with bare hands. This is the bare-metal version of Origami. While on a road trip many years ago, he was bereft of electronic devices to keep him busy. Playing with an empty can of soda, he started denting and squeezing the thin metal in to an abstract shape. That’s when the artist in him realized that he was playing with an exciting new medium. After making some abstract art pieces out of empty cans of a vermillion bovine energy drink, he figured it would look much more awesome if he could remove all the paint from the cans and give them a smooth, polished, natural finish. He made a little machine that rotates the cans so he can strip the paint and bring the cans to a high polish. The technique is simple but requires a lot of patience, practice, time and skill, not to mention that it will cause a lot of pain in the thumb.
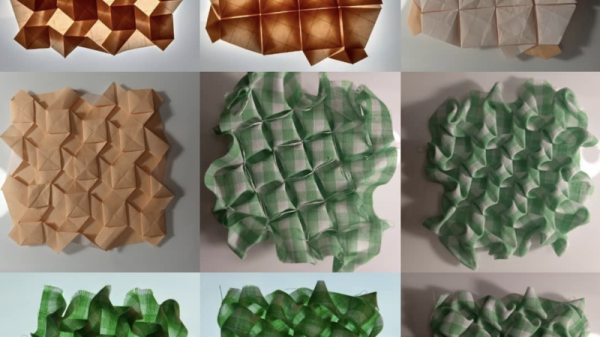
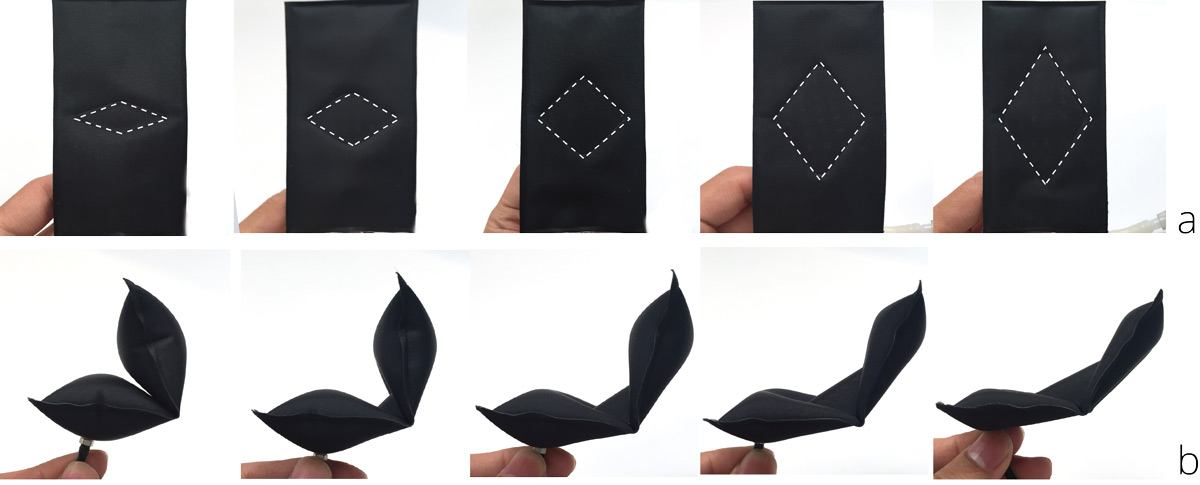
If you’ve ever been to Japan and drank a can of Kirin Hyoketsu, you’d notice the un-opened can is smooth, but immediately changes to a pattern of indented diamonds once you open it. That design was created by Kyoro Miura, well-known for the Miura Fold that lets you fold and unfold large sheets of paper in one smooth movement. Like that discarded map in the glove box of the car you’re riding in, while playing with an empty can of soda.
If you want to hone some ambidextrous skills, this would be a good way to do it while on your next road, plane or train trip. Check out the two videos embedded below. In the second one, you can see snapshots of the design process.
Thanks, [Keith O], for this tip.
Continue reading “Soda Can Art” →