
For the maker looking to turn their project into a business, trying to price your widget can be a bit of a conundrum. You want to share your widget with the world without going broke in the process. What if you could achieve both, letting the end user finish assembly? [PDF]
While over a decade has passed since Harvard Business School released this study on what they dub “The IKEA Effect,” we suspect that most of it will still be relevant given the slow pace of human behavior change. In short, when you make someone become part of the process of manufacturing or assembling their stuff, it makes them value it more highly than if it was already all put together in the box.
Interestingly, the researchers found “that consumers believe that their self-made products rival those of experts,” and that this is true regardless of whether these people consider themselves to be DIY enthusiasts or not. This only holds if the person is successful though, so it’s critical to have good instructions. If you have a mass market item in the works, you probably don’t want to require someone with no experience to solder something, but as IKEA has shown, nearly anybody can handle some hex screws and Allen wrenches.
If you’re looking for more advice on how to get your invention in people’s hands, how about this Supercon talk by Carrie Sundra about manufacturing on a shoestring budget or this video from Simone Giertz on her experiences with manufacturing from idea to finished product. You might want to steer clear of people promising patents for pennies on commercials, though.

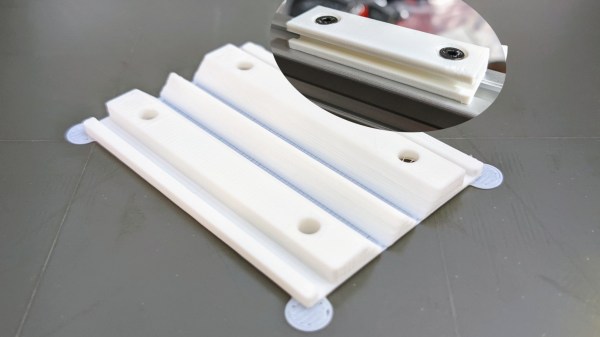
 The example Chris provides is a Eurorack rail segment — due to the kind of overhangs required, you’d be inclined to print it vertically, taking a hit to the print time and introducing structural weaknesses. With this trick, you absolutely don’t have to! You can also go way further and 3D print a single-piece foldable
The example Chris provides is a Eurorack rail segment — due to the kind of overhangs required, you’d be inclined to print it vertically, taking a hit to the print time and introducing structural weaknesses. With this trick, you absolutely don’t have to! You can also go way further and 3D print a single-piece foldable 


 Having access to a laser cutter made the job much easier than it could have been and allowed [Matt] to go through many designs for the lamp frame. The two main pieces were cut from acrylic and include mounting pegs for the elastic bands. The two plastic pieces are designed to slot together, forming a sort of diamond shape.
Having access to a laser cutter made the job much easier than it could have been and allowed [Matt] to go through many designs for the lamp frame. The two main pieces were cut from acrylic and include mounting pegs for the elastic bands. The two plastic pieces are designed to slot together, forming a sort of diamond shape.








