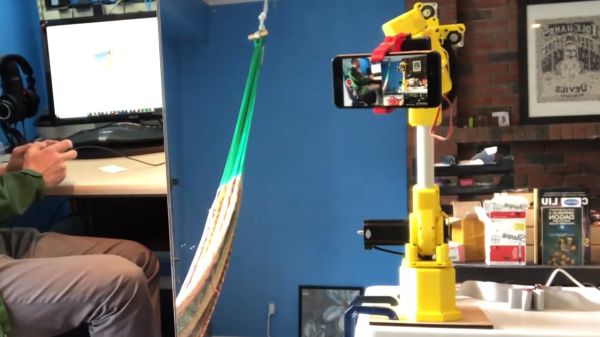
Following a surge of creativity fueled by the current lockdown, [Diglo] writes in with his tabletop clock driven by a robotic arm drawing on a Magna Doodle tablet. And if you have one of those still lying around with some old toys and don’t mind cannibalizing it for the project, you too can follow along the source files to build your own.
The clock works by exploiting the principle that Magna Doodle tablets work by being drawn on with a magnetic stylus. That way, to draw on one of them you don’t need to add a point of articulation to bring the pen up and down, [Diglo] simply attached a controllable electromagnet to the end of a two-dimensional SCARA arm. In total, the whole build uses three stepper motors, two to control the movement of the arm, and one on the back of the tablet to sweep a magnetic bar which “erases” it.
This clock is similar to another we’ve featured a few years ago, which also used a Magna Doodle, but greatly improves on the idea. If a Magna Doodle seems too childish to build a magnetic clock however, there’s always ferrofluidic displays to try to dip your fingers into, but we really think you should watch this one in action after the break first.
Continue reading “Inverse Kinematics Robot Arm Magna-Doodles The Time For You”