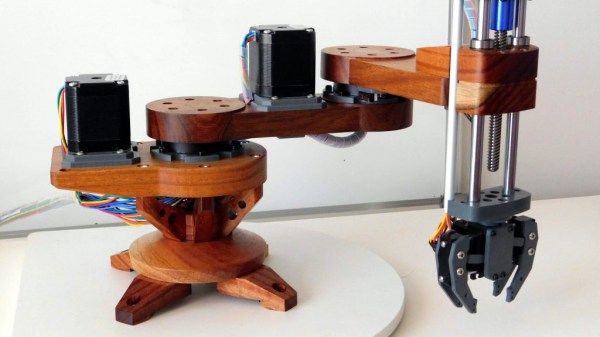
A great many robots exist in our modern world, and the vast majority of them are highly specialized machines. They do a job, and they do it well, but they don’t have much of a personality. [Guilherme Martins] was working on a fun project to build a robot arm that could create chocolate artworks, but it needed something to humanize it a bit more. Thankfully, Jibo was there to lend a hand.
For the uninitiated, Jibo was a companion robot produced by a startup company that later folded. Relying on the cloud meant that when the money ran out and the servers switched off, Jibo was essentially dead. [Guilherme] managed to salvage one of these units, however, and gave it a new life.
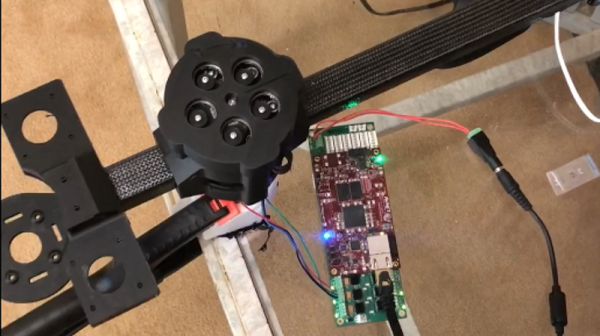
With the dead company unable to provide an SDK, the entire brains of the robot were replaced with a LattePanda, which is a Windows 10 single-board computer with an integrated Arduino microcontroller. This was combined with a series of Phidgets motor drivers to control all of Jibo’s joints, and with some Unity software to provide the charming expressions on the original screen.
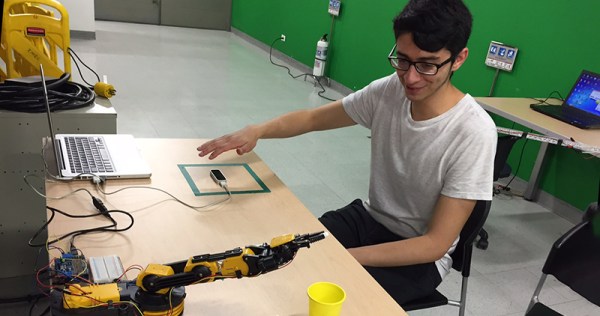
With the Jibo body mounted upon the robot arm, a simple chocolate-decorating robot now has a personality. The robot can wave to humans, and emote as it goes about its day. It’s an interesting feature to add to a project, and one that certainly makes it more fun. We’ve seen projects tackle similar subject matter before, attempting to build friendly robot pets as companions. Video after the break.
Continue reading “Humanizing Industrial Robots By Sticking A Jibo On Top” →