Illegal, yet impressive

Want a soda? Just grab a robot, shove it in a vending machine, and grab yourself one. This video is incredibly French, but it looks like we’ve got a custom-built robot made out of old printers and other miscellaneous motors and gears here. It’s actually pretty impressive when you consider 16 ounce cans weigh a pound.
UNOBTANIUM

Okay, we got a lot of emails on our tip line for this one. It’s a group buy for a programmable oscillator over on Tindie. Why is this cool? Well, this chip (an SI570) is used in a lot of software defined radio designs. Also, it’s incredibly hard to come by if you’re not ordering thousands of these at a time. Here’s a datasheet, now show us some builds with this oscillator.
Chiptune/keygen music anywhere
[Huan] has a co-loco’d Raspi and wanted a media server that is available anywhere, on any device. What he came up with is a service that streams chiptune music from your favorite keygens. You can access it with Chrome (no, we’re not linking directly to a Raspberry Pi), and it’s extremely efficient – his RAM usage didn’t increase a bit.
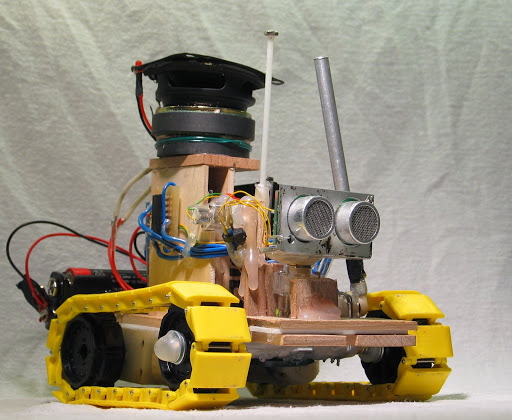
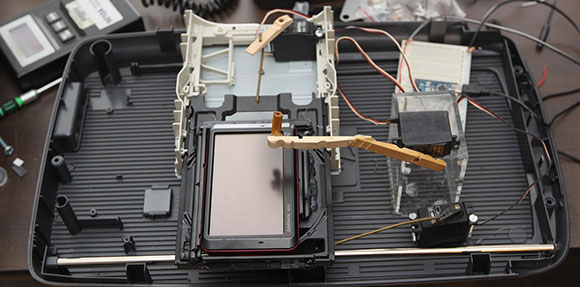
Take it on an airplane. Or mail it.
[Alex]’s hackerspace just had a series of lightning talks, where people with 45-minute long presentations try to condense their talk into 10 minutes. Of course the hackerspace needed some way to keep everything on schedule. A simple countdown timer was too boring, so they went with a fake, Hollywood-style bomb. No, it doesn’t explode, but it still looks really, really fake. That’s a good thing.
Printers have speakers now?
[ddrboxman] thought his reprap needed a nice ‘print finished’ notification. After adding a piezo to his electronics board, he whipped up a firmware hack that plays those old Nokia ringtones. The ringtones play over Gcode, so it’s possible to have audible warnings and notifications. Now if it could only play Snake.