We’ve all seen those tiny little RC cars that can climb walls thanks to the suction generated with fans. Their principle is essentially the opposite to that of a hovercraft. [Engineering After Hours] wanted to build his own RC car that could do the same, driving upside down and generating huge amounts of grip.
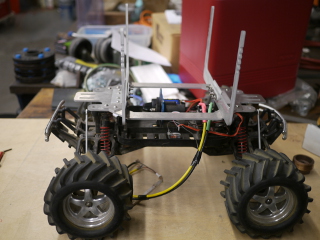
The build is based on a Traxxas RC car, but heavily modified for the task. An undertray is crafted, with ducts feeding a pair of twin 50mm electric fans. A skirt is fitted around the edge of the undertray, helping create a seal to maximise the downforce generated. This skirt is the area of much engineering effort, as it must form a good seal with the ground, particularly over minor pertubations, without creating undue levels of friction. Suspension components correspondingly need to be beefed up to stop the car bottoming out with the huge downforce generated by the fan system.
After much experimentation, the kinks are worked out, and the car is able to drive upside down successfully. It generates far more downforce than earlier wing experiments from [Engineering After Hours], as expected – with a tradeoff of higher weight and complexity. With the plan to create an RC car capable of huge lateral acceleration, we can’t wait to see what comes next. Video after the break.