Open source pick and place machines have come a long way in the past years, but are not necessarily worth the setup time and machine cost if you are only building a few PCBs at a time. [Nuri Erginer] found himself in this situation regularly, so he created PnPAssist, a “smart” build platform to speed up manual PCB assembly. Video after the break.
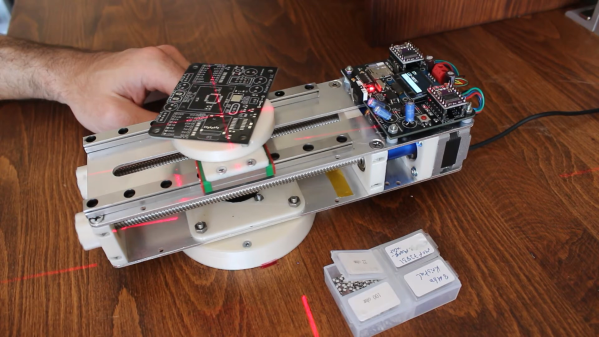
The PnP assist consists of a small circular platform that can automatically translate and rotate to place the current footprint in the middle of the platform, right in the center of your microscope’s view, and a laser crosshair. The entire device can also rotate freely on its base to avoid contorting your arm to match the footprint orientation. Just export the PnP file from your favorite PCB design software, load it on a micro SD card, plug it into the PnPAssist, and start assembling. The relevant component information is displayed on a small OLED display right on the machine. [Nuri] has also created a component organizing tray that will indicate the correct compartment with an RGB LED.
Below the build platform, a 3D printed gear is in contact with a pair of parallel lead screws driven by stepper motors. The relative motion of the lead screws allows the platform to rotate, translate, or both. This arrangement also means the machine is a lot more compact than a conventional XY-table and can be packed away when not in use. The base is held firmly in place on the workbench with a set of suction cups or screws. Power is provided through the fixed base using a slip-ring, so there are no cables to twist up as you spin the machine around.Continue reading “PnPAssist: A “Smart” Build Platform For Manual PCB Assembly”→
Well, that was quite a show! The Perseverance rover arrived on Mars Thursday. Don’t tell the boss, but we spent the afternoon watching the coverage in the house on the big TV rather than slaving away in the office. It was worth it; for someone who grew up watching Jules Bergman and Frank Reynolds cover the Apollo program and the sometimes cheesy animations provided by NASA, the current coverage is pretty intense. A replay of the coverage is available – skip to about the 1:15:00 mark to avoid all the filler and fluff preceding the “Seven Minutes of Terror” main event. And not only did they safely deliver the package, but they absolutely nailed the landing. Perseverance is only about 2 km away from the ancient river delta it was sent to explore for signs of life. Nice shooting!
We’re also being treated to early images from Jezero crater. The first lowish-rez shots, from the fore and after hazard cameras, popped up just a few seconds after landing — the dust hadn’t even settled yet! Some wags complained about the image quality, apparently without thinking that the really good camera gear was stowed away and a couple of quick check images with engineering cameras would be a good idea while the rover still had contact with the Mars Reconnaissance Orbiter. Speaking of which, the HiRISE camera on the MRO managed to catch a stunning view of Perseverance’s descent under its parachute; the taking of that photo is an engineering feat all by itself. But all of this pales in comparison to a shot from one of the down-looking cameras in the descent stage, show Perseverance dangling from the skycrane just before touchdown. It was a really good day for engineering.
Would that our Earthly supply chains were as well-engineered as our Martian delivery systems. We’ve been hearing of issues all along the electronics supply chain, impacting a wide range of industries. Some of the problems are related to COVID-19, which has sickened workers staffing production and shipping lines. Some, though, like a fire at the AKM semiconductor plant in Japan, have introduced another pinch point in an already strained system. The fire was in October, but the impact on the manufacturer depending on the plant’s large-scale integration (LSI) and temperature-compensated crystal oscillators (TCXO) products is only just now being felt in the amateur radio market. The impact is likely not limited to that market, though — TCXOs pop up lots of gear, and the AKM plant made LSI chips for all kinds of applications.
What do you get when you combine a 3D-printer, a laser cutter, a CNC router, and a pick-and-place robot? Drones that fly right off the build plate, apparently. Aptly enough, it’s called LaserFactory, and it comes from MITs Computer Science and Artificial Intelligence Lab. By making different “bolt-on” tools for a laser cutter, the CSAIL team has combined multiple next-generation manufacturing methods in one platform. The video below shows a drone frame being laser-cut from acrylic, to which conductive silver paste is added by an extruder. A pick-and-place head puts components on the silver goo, solders everything together with a laser, and away it goes. They also show off ways of building up 3D structures, both by stacking up flat pieces of acrylic and by cutting and bending acrylic in situ. It’s obviously still just a proof of concept, but we really like the ideas presented here.
And finally, as proof that astronomers can both admit when they’re wrong and have fun while doing so, the most remote object in the Solar System has finally received a name. The object, a 400-km diameter object in a highly elliptical orbit that takes it from inside the orbit of Neptune to as far as 175 astronomical units (AU) from the Sun, is officially known as 2018 AG37. Having whimsically dubbed the previous furthest-known object “Farout,” astronomers kept with the theme and named its wayward sister “Farfarout.” Given the rapid gains in technology, chances are good that Farfarout won’t stay the Sun’s remotest outpost for long, and we fear the (Far)nout trend will eventually collapse under its own weight. We therefore modestly propose a more sensible naming scheme, perhaps something along the lines of “Farthest McFaraway.” It may not scale well, but at least it’s stupid.
Surface mount devices were once upon a time considered a huge imposition for the electronics hobbyist. Tiny, difficult to solder by hand, and barely even labelled, many wondered whether the pastime was about to hit a brick wall entirely. Instead, enterprising hackers and makers set about learning new tricks and techniques to work with the technology, and we’ve never looked back since. [Seon] is one such enthusiast, and has built a useful turntable for making manually picking and placing boards easier. (Video, embedded below.)
The design is something [Seon] has refined gradually over time, having built two initial versions of the turntable before finally feeling ready to do a wider public release with version 3. It consists of a rotating caddy that has radial slots that hold all the tiny SMD parts, that can be labelled for easy parts identification. There’s also an acrylic window that ensures only one segment of the caddy is open at a time, to avoid accidentally dropping similar, tiny looking parts into adjacent slots – a big improvement over the first design. There’s then a smaller rotating central pad upon which a PCB can be placed, ready to receive parts.
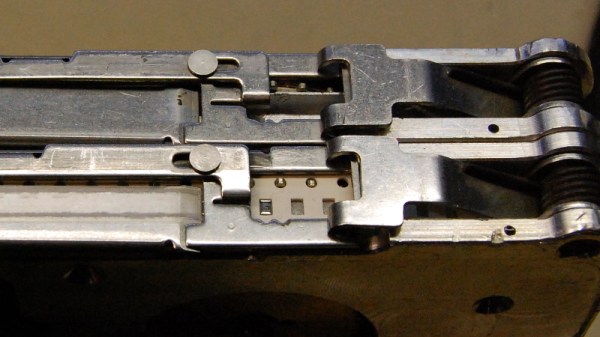
Many of Hackaday’s readers will be no stranger to surface mount electronic components, to the extent that you’ll likely be quite comfortable building your own surface-mount projects. If you have ever built a very large surface-mount project, or had to do a number of the same board though, you’ll have wished that you had access to a pick-and-place machine. These essential components of an electronics assembly line are CNC robots that pick up components from the reels of tape in which they are supplied, and place them in the appropriate orientation in their allotted places on the PCB. They are an object of desire in the hardware hacker community and over the years we’ve seen quite a few home-made examples. Their workings are easy enough to understand, but there is still much to gain by studying them, thus it was very interesting indeed to see a friend acquiring a quantity of surplus Siemens component feeders from an older industrial pick-and-place machine. A perfect opportunity for a teardown then, to see what makes them tick.
Hardly a week goes by without a headline screaming about some asteroid or another making a close approach to Earth; it’s only by reading the fine print that we remember what an astronomer’s definition of “close” means. Still, 2020 being what it is, it pays to stay on top of these things, and when you do the story can get really interesting. Take asteroid 2020 SO, a tiny near-Earth asteroid that was discovered just last week. In a couple of weeks, 2020 SO will be temporarily captured into Earth orbit and come with 50,000 km near the beginning of December. That’s cool and all, but what’s really interesting about this asteroid is that it may not be a rock at all. NASA scientists have reverse-engineered the complex orbit of the object and found that it was in the vicinity of Earth in late 1966. They think it may be a Centaur booster from the Surveyor 2 moon mission, launched in September 1966 in the runup to Apollo. The object will be close enough for spectral analysis of its. surface; if it’s the booster, the titanium dioxide in the white paint should show up loud and clear.
Lasers are sort of forbidden fruit for geeks — you know you can put an eye out with them, and still, when you get your hands on even a low-power laser pointer, it’s hard to resist the urge to shine it where you shouldn’t. That includes into the night sky, which as cool as it looks could be bad news for pilots, and then for you. Luckily, friend of Hackaday Seb Lee-Delisle has figured out a way for you to blast lasers into the night sky to your heart’s content. The project is called Laser Light City and takes place in Seb’s home base of Brighton int he UK on October 1. The interactive installation will have three tall buildings with three powerful lasers mounted on each; a smartphone app will let participants control the direction, shape, and color of each beam. It sounds like a load of fun, so check it out if you’re in the area.
We got an interesting story from a JR Nelis about a quick hack he came up with to help his wife stay connected. The whole post is worth a read, but the short version of the story is that his wife has dementia and is in assisted living. Her landline phone is her social lifeline, but she can’t be trusted with it, lest she makes inappropriate calls. His solution was to modify her favorite cordless phone by modifying the keypad, turning it into a receive-only phone. It’s a sad but touching story, and it may prove useful to others with loved ones in similar situations.
We pay a lot of attention to the history of the early computer scene, but we tend to concentrate on computers that were popular in North America and the UK. But the Anglo-American computers were far from the only game in town, and there’s a new effort afoot to celebrate one of the less well-known but still important pioneer computers: the Galaksija. Aside from having a cool name, the Yugoslavian Z80 computer has a great story that will be told in documentary form, as part of the crowdsourced Galaksija project. The documentary stars our own Voja Antonic, who was key to the computer’s development. In addition to the film, the project seeks to produce a replica of the Galaksija in kit form. Check out the Crowd Supply page and see if it’s something you’re willing to back.
There’s an interesting new podcast out there: the Pick, Place, Podcast. Hosted by Chris Denney and Melissa Hough, it comes out every other week and is dedicated to the electronic assembly industry. They’ve currently got eight episodes in the can ranging from pick and place assembly to parts purchasing to solder paste printing. If you want to learn a little more about PCB assembly, this could be a real asset. Of course don’t forget to make time for our own Hackaday Podcast, where editors Mike and Elliot get together to discuss the week in hardware hacking.
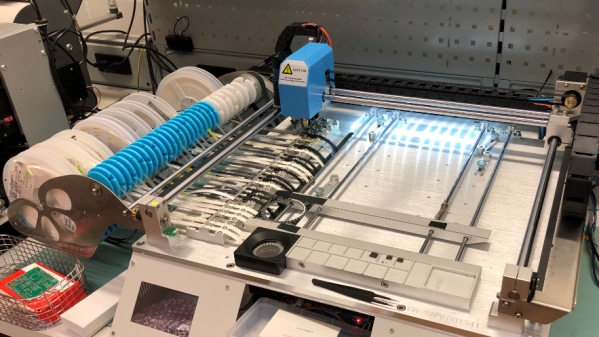
[Erich Styger] owns a Charmhigh CHM-T36VA pick and place machine, which he describes as well-built and a great value of hardware for the money. However, the software end is less impressive, with a proprietary controller that is functional but not great. The good news is that it is possible to retrofit the machine to use the OpenPnP framework, which is open-source and offers more features. Even better, [Erich] has already done and documented all the hard parts!
The CHM-T36VA has two heads, vision system, and uses drag feeders.
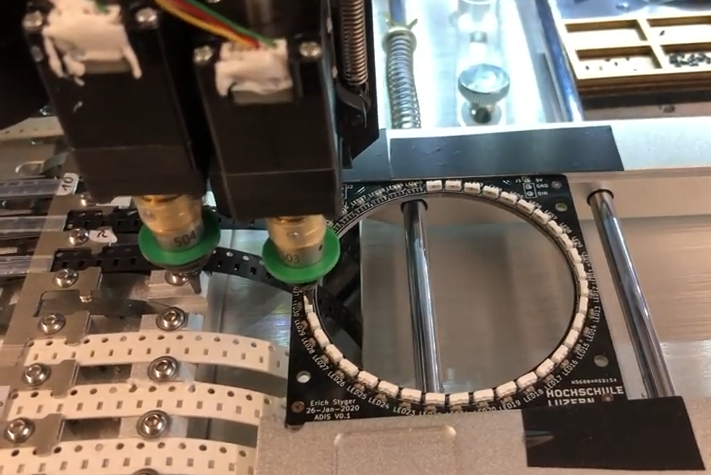
The conversion requires upgrading a few hardware parts such as the cameras, replacing the controller’s firmware, then installing and configuring OpenPnP (which runs on an attached PC.)
[Erich] does not recommend this conversion for anyone who is not very familiar with electronics, or has any worries about voiding warranties. Barring that, he suspects the conversion could be done in about a day or two’s worth of focused work. It took him two weeks, including time spent fine-tuning the first production job. He says the bulk of the time was spent on configuration, but he has shared his configuration on GitHub in the hopes that it will save a lot of time for anyone using the same hardware.
After populating some 300 boards and placing over 7000 parts, he’s very happy with the results. The machine places between 600 and 700 parts per hour, so speed might not be amazing but it’s perfectly serviceable. [Erich] finds that while the machine runs a little slower than it did with the original controller, it also runs much smoother and quieter overall. In return he gets what he truly wanted: a pick and place machine whose operation and configuration is entirely open and accessible. You can see it in action in the video, embedded below.
Hackaday editors Elliot Williams and Mike Szczys ride the rails of hackerdom, exploring the sweetest hacks of the past week. There’s a dead simple component feeder for a pick and place (or any bench that hand-stuffs SMD), batteries for any accomplished mixologist, and a droid build that’s every bit as cool as its Star Wars origins. Plus we gab about obsolescence in the auto industry, fawn over a frugal microcontroller, and ogle some old iron.
Take a look at the links below if you want to follow along, and as always, tell us what you think about this episode in the comments!