[visualkev]’s friend was putting on his own fireworks show by lighting each one in turn, then running away. It occurred to [visualkev] that his friend wasn’t really enjoying the show himself because he was ducking for cover instead of watching the fun. Plus, it was kind of dangerous. Accordingly, he applied his hacker skills to the challenge by creating a custom fireworks sequencer.
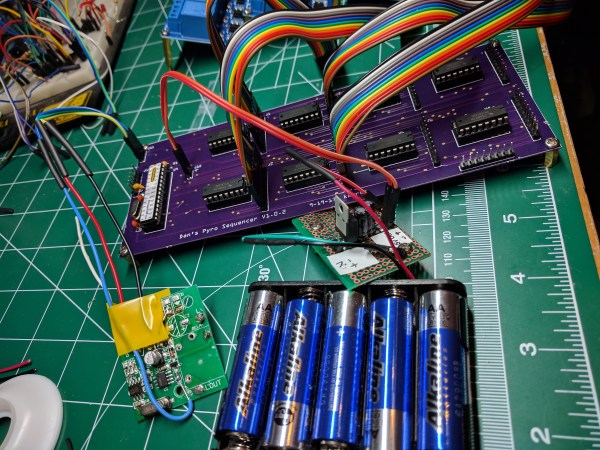
He used a custom PCB from OSH Park with an ATMega328P controlling eight TPIC6C595 8-bit shift registers, which in turn trip the 64 relays connecting to the fireworks. A 5V regulator supplies the project from 5 5AA batteries, and he kept the wires neat with 8-wire ribbon cables.
Starting the sequence is a generic wireless remote — a cheapie from Walmart — allowing [visualkev]’s friend can launch the fireworks with one hand while working the barbecue tongs with the other.