Researching a piece on vacuum tubes, we stumbled on something unexpected from Electro-Harmonix, best known for guitar amplifiers and audio tube manufacture. In a break from their core business, they plan to tap energy from the magnetosphere. This came as something of a surprise to their guitarist customers who were no doubt expecting a fancy new effects pedal, but it seems they’re serious.
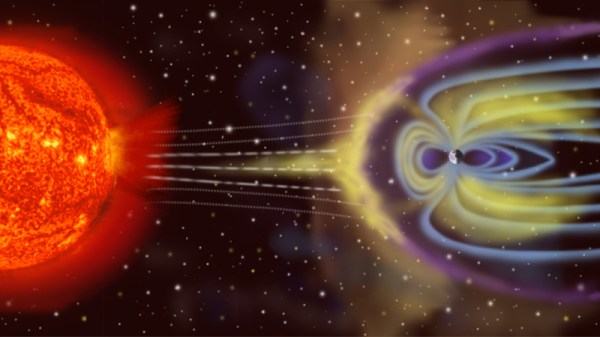
The magnetosphere is the region of space surrounding the earth in which the earth’s magnetic field has most influence, and unlike the tidy pattern of magnetic field surrounding a bar magnet that you might have seen with iron filings at school, it’s distorted by the constant buffeting of the solar wind. This means that a significant quantity of potential energy is stored in its compression, and it’s this energy that Electro-Harmonix have their eye on.
Like Fox Mulder: we want to believe. Unfortunately the trouble with such ideas is readily visible with a quick web search; they attract a significant number of what one might charitably call cranks, and there is no shortage of unsubstantiated claims surrounding conspiracy theories, silenced genus inventors, and their mystery devices. Weird and wonderful descriptions and cryptic circuit diagrams abound, so separating the wheat if there is any from the inevitable chaff becomes a challenge. We respect that the Electro-Harmonix team are professional engineers who we hope are unlikely to become caught up in the weirder part of the Internet, but we’ll reserve our judgement until they provide more technical details of what they propose.
Header: NASA, Public domain.