For as long as super-heroes have existed, they have inspired hacker projects. For [Everett Bradford], emulating the character Pyro from X-Men has been an on and off project for the last decade. His latest version, Pyro System V4, integrates quite a bit of control electronics to give the rather convincing effect of mind-controlled fire in the palm of his hand. (Video, embedded below.)
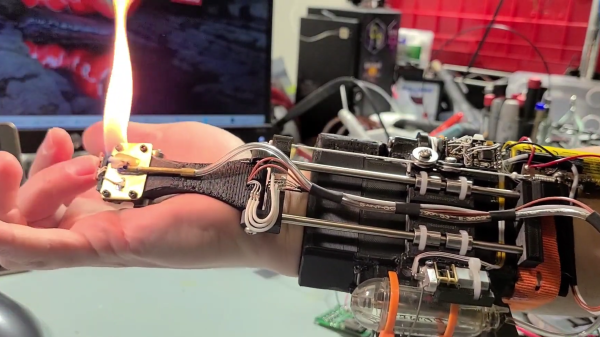
The system is a motor-actuated slider strapped to [Everett]’s forearm, which pushes a pivoting end-effector with an integrated butane burner into the palm of his hand. The slider runs on 4 mm linear bearings actuated by a small geared DC motor using cables. The end effector is spring-loaded to push it into the palm and integrates a high voltage ignition arc generator circuit, nozzle, and capacitive activation button.
The butane gas canister and the valve was cannibalized from a small blow torch lighter, and the valve is actuated by another geared DC motor. The valve actuator, slide actuator, and end-effector hinge all integrate position feedback via hall effect sensors and magnets. The sensor in the hinge allows the slide to actively correct for the angle of the user’s wrist, keeping the end effector in the middle of the palm.
The control circuit is split into two parts. One PIC16 microcontroller runs all the motion control and position sensing, while a PIC18 connected to a small touch screen handles user interface, control parameters, and ignition. The touch screen proved especially useful for control parameters during development without needing to connect to a laptop.
Some of [Everett]’s previous version had a much more impressive (and dangerous) flame but was also very bulky. We think this latest version strikes a pretty good balance regarding compactness and achieving convincing illusion.
[Colin Furze] is another name commonly associated with fire-breathing contraptions, but they have a proven history of landing him in hospital.