
Fabrics with electrical functionality have been around for several years, but are very rarely used in mainstream clothing. The fabrics are very expensive and the supply can be unreliable. Frustrated by this, [Counter Chemists] developed PolySense, simple open-source technology to make any fibrous material into a conductive material that can be used to sense pressure, stretch, capacitive touch, humidity, or temperature.
PolySense uses a process called in-situ polymerization, effectively dying a fabric to become piezoelectric. This is done by first soaking the fabric in a mixture of water and the organic compound pyrrole, and then adding iron chloride to trigger a reaction. The polymerization process that takes place wraps the individual fibers of the fabric in conductive polymer chains.
Instead of just uniformly coating a fabric, various masking techniques can be used to dye patterns onto the fabric for various use cases. The video after the break shows a range of these applications, including using polymerized gloves and leggings for motion capture, a zipper that acts like a linear potentiometer, and touch-sensitive fabric. The project page lists sources for the required chemicals in both Europe and the US, and we look forward to seeing what other applications the community can come up with.
The project is very well documented, with a number of scientific papers covering all the details. [Counter Chemists] will also be presenting PolySense at the 2020 Virtual Maker Faire.
This technology can also be used to make a fabric piano with a lot less effort. On the more mechanical side of things, you can also 3D print on pre-stretched fabric to make it pop into 3D shapes.
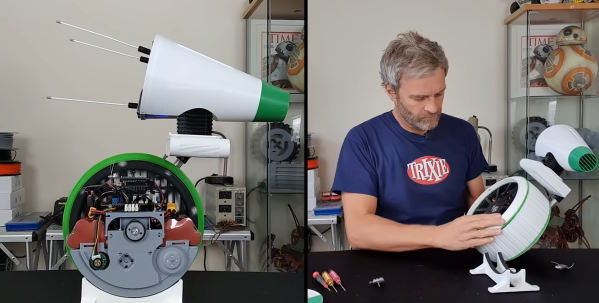
 D-O is effectively a two-wheeled self-balancing robot, with two thin drive wheels on the outer edges of the main body. A wide flexible tire covers the space between the two wheels, where the electronics are housed, without actually forming part of the drive mechanism. The main drive motors are a pair of geared DC motors with encoders to allow closed-loop control down to very slow speeds. The brains of the operation is an Arduino MKR-W1010 GET on a stack that consists of a motor driver, shield, IMU shields, and prototyping shield. [Matt] did discover a design error on the motor driver board, which caused the main power switching MOSFET to burst into flames from excessive gate voltage. Fortunately he was able to work around this by simply removing the blown MOSFET and bridging the connection with a wire.
D-O is effectively a two-wheeled self-balancing robot, with two thin drive wheels on the outer edges of the main body. A wide flexible tire covers the space between the two wheels, where the electronics are housed, without actually forming part of the drive mechanism. The main drive motors are a pair of geared DC motors with encoders to allow closed-loop control down to very slow speeds. The brains of the operation is an Arduino MKR-W1010 GET on a stack that consists of a motor driver, shield, IMU shields, and prototyping shield. [Matt] did discover a design error on the motor driver board, which caused the main power switching MOSFET to burst into flames from excessive gate voltage. Fortunately he was able to work around this by simply removing the blown MOSFET and bridging the connection with a wire.




 [Joel] wants his model to be as close as possible to the real thing, and has integrated all these features into his build. Thrust is provided by two EDF motors, the pivoting nozzle is 3D printed and actuated by three set of small DC motors, and all 5 doors for VTOL are actuated by a single servo in the nose via a series of linkages. For tilt control, air from the main fan is channeled to the wing-tips and controlled by servo-actuated valves. A flight controller intended for use on a multi-rotor is used to help keep the plane stable while hovering. One iteration of this plane bit the dust during development, but [Joel] has done successful test flights for both hover and conventional horizontal flight. The really tricky part will be transitioning between flight modes, and [Joel] hopes to achieve that in the near future.
[Joel] wants his model to be as close as possible to the real thing, and has integrated all these features into his build. Thrust is provided by two EDF motors, the pivoting nozzle is 3D printed and actuated by three set of small DC motors, and all 5 doors for VTOL are actuated by a single servo in the nose via a series of linkages. For tilt control, air from the main fan is channeled to the wing-tips and controlled by servo-actuated valves. A flight controller intended for use on a multi-rotor is used to help keep the plane stable while hovering. One iteration of this plane bit the dust during development, but [Joel] has done successful test flights for both hover and conventional horizontal flight. The really tricky part will be transitioning between flight modes, and [Joel] hopes to achieve that in the near future.








