Sorting trash into the right categories is pretty much a daily bother. Who hasn’t stood there in front of the two, three, five or more bins (depending on your area and country), pondering which bin it should go into? [Alvaro Ferrán Cifuentes]’s SeparAItor project is a proof of concept robot that uses a robotic sorting tray and a camera setup that aims to identify and sort trash that is put into the sorting tray.
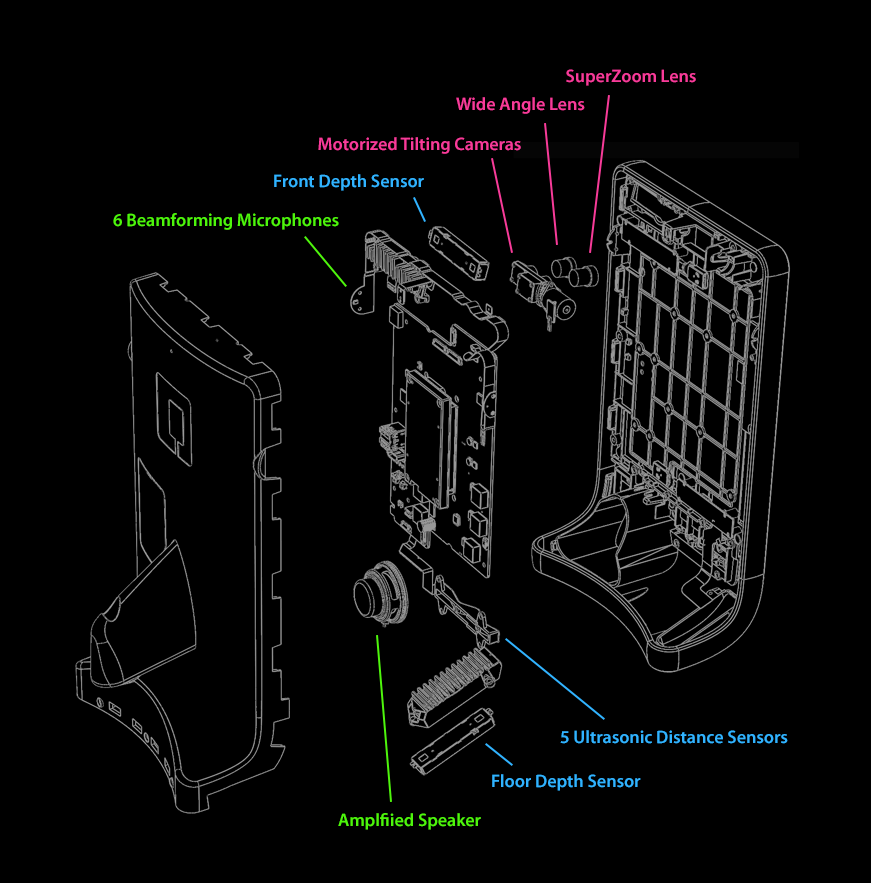
The hardware consists of a sorting tray mounted to the top of a Bluetooth-connected pan and tilt platform. The platform communicates with the rest of the system, which uses a camera and OpenCV to obtain the image data, and a Keras-based back-end which implements a deep learning neural network in Python.
Training of the system was performed by using self-made photos of the items that would need to be sorted as these would most closely match real-life conditions. After getting good enough recognition results, the system was put together, with a motion detection feature added to respond when a new item was tossed into the tray. The system will then attempt to identify the item, categorize it, and instruct the platform to rotate to the correct orientation before tilting and dropping it into the appropriate bin. See the embedded video after the break for the system in action.
Believe it or not, this isn’t the first trash-sorting robot to grace the pages of Hackaday. Potentially concepts like these, that rely on automation and machine vision, could one day be deployed on a large scale to help reduce how much recyclable material end up in landfills. Continue reading “Automate Sorting Your Trash With Some Healthy Machine Learning”