Getting exact statistics on one’s physical activities at the gym, is not an easy feat. While most people these days are familiar with or even regularly use one of those motion-based trackers on their wrist, there’s a big question as to their accuracy. After all, it’s all based on the motions of just one’s wrist, which as we know leads to amusing results in the tracker app when one does things like waving or clapping one’s hands, and cannot track leg exercises at the gym.
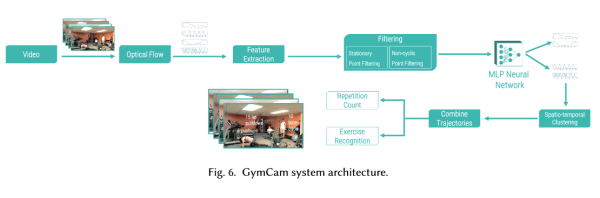
To get around the issue of limited sensor data, researchers at Carnegie Mellon University (Pittsburgh, USA) developed a system based around a camera and machine vision algorithms. While other camera solutions that attempt this suffer from occlusion while trying to track individual people as accurately as possible, this new system instead doesn’t try to track people’s joints, but merely motion at specific exercise machines by looking for repetitive motion in the scene.
The basic concept is that repetitive motion usually indicates forms of exercise, and that no two people at the same type of machine will ever be fully in sync with their motions, so that merely a handful of pixels suffice to track motion at that machine by a single person. This also negates many privacy issues, as the resolution doesn’t have to be high enough to see faces or track joints with any degree of accuracy.
In experiments at the university’s gym, the accuracy of their system over 5 days and 42 hours of video. Detecting exercise activities in the scene was with a 99.6% accuracy, disambiguating between simultaneous activities was 84.6% accurate, while recognizing exercise types was 93.6% accurate. Ultimately repetition counts for specific exercises were within 1.7 counts.
Maybe an extended version of this would be a flying drone capturing one’s outside activities, giving one finally that 100% accurate exercise account while jogging?
Thanks to [Qes] for sending this one in!