Over the years we’ve featured countless drone projects here at Hackaday, fixed wing, rotary wing, multi-rotor, and more. Among them all we think there may be a type that we’ve never seen, but that is about to change as it’s the first time we’ve brought you an edible drone.
Why might you need an edible drone, you ask? It’s not to conceal the evidence after closing an airport — instead it’s a research project from the Swiss Federal Institute of Technology to produce an efficient means of bringing sustenance to stranded climbers. The St. Bernard dogs are out of a job, it’s now done the modern way!
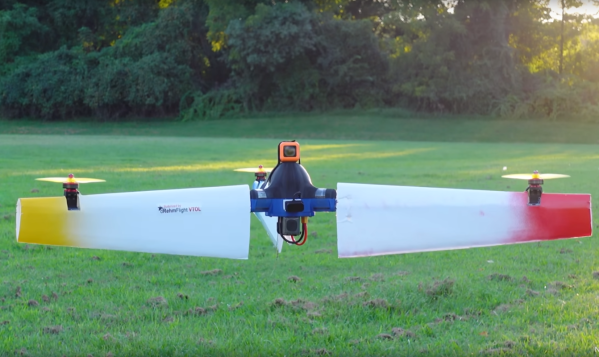
Jokes aside, this is clearly an experimental craft, a fixed-wing monoplane whose wings are made from rice cakes and gelatin. A stranded climber could certainly munch away at those airofoils, but we’re guessing a real device would need something a little more nutritious while retaining the light cellular structure.
This may be our first edible drone, but it’s not the first piece of edible technology we’ve brought you.