There’s a new soap opera that I can’t stop watching. Actually, I wish I could change the channel but this is unfortunately happening in real life. It’s likely the ups and downs of drone sightings would be too far fetched for fiction anyway.
If you aren’t British, maybe you will know a little of our culture through the medium of television. We don’t all live in stately homes like Downton Abbey of course, instead we’re closer to the sometimes comedic sets, bad lighting, and ridiculously complicated lives of the residents of Coronation Street or of Albert Square in Eastenders that you may have flashed past late at night on a high-number channel.
Unfortunately it didn’t end there. We’re back once more to catch up with the latest events down on the tarmac, and come away with a fresh set of reasonable questions unanswered by the popular coverage of the matter.
The build uses a single large brushless motor in the tail for primary thrust. Four movable vanes provide thrust vectoring capability. To supplement this control a quadcopter was gutted, and its motors rearranged in the nose of the craft to create a secondary set of thrusters which aid stabilization and maneuverability.
The aim is to experiment with a flight regime consisting of vertical takeoff followed by coasting horizontally before returning to a vertical orientation for landing. Preliminary results have been positive, though it was noted that the body of the aircraft is significantly reducing the available thrust from the motors.
It’s a creative design which recalls the SpaceX vertical landing rockets of recent times. We’re excited to see where this project leads, and as we’ve seen before – brushless power can make just about anything fly. Even chocolate. Video after the break.
When you think about all the forces that have to be balanced to keep a drone stable, it’s a wonder that the contraptions stay in the air at all. And when the only option for producing those forces is blowing around more or less air it’s natural to start looking for other, perhaps better ways to achieve flight control.
Taking a cue from the spacecraft industry, [Tom Stanton] decided to explore reaction wheels for controlling drones. The idea is simple – put a pair of relatively massive motorized wheels at right angles to each other on a drone, and use the forces they produce when they accelerate to control the drone’s pitch and roll. [Tom]’s video below gives a long and clear explanation of the physics involved before getting to the build, which results in an ungainly craft a little reminiscent of a lunar lander. The drone actually manages a few short, somewhat stable flights, but in general the reaction wheels don’t seem to be up to the task. [Tom] chalks this up to the fact that he’s using the current draw of each reaction wheel motor as a measure of its torque, which is not exactly correct for all situations. He suggests that motors with encoders might do a better job, but by the end of the video the little drone isn’t exactly in shape for continued experimentation.
The last few days have seen drone stories in the news, as London’s Gatwick airport remained closed for a couple of days amid a spate of drone reports. The police remained baffled, arrested a couple who turned out to be blameless, and finally admitted that there was a possibility the drone could not have existed at all. It emerged that a problem with the investigation lay in there being no means to detect a drone beyond the eyesight of people on the ground, and as we have explored in these pages already, eyewitness reports are not always trustworthy.
Not much use against a small and mostly plastic multirotor. Sixflashphoto [CC BY-SA 4.0]
Radar Can’t See Them
It seems odd at first sight, that a 21st century airport lacks the ability to spot a drone in the air above it, but a few calls to friends of Hackaday in the business made it clear that drones are extremely difficult to spot using the radar systems on a typical airport. A system designed to track huge metal airliners at significant altitude is not suitable for watching tiny mostly-plastic machines viewed side-on at the low altitudes. We’re told at best an intermittent trace appears, but for the majority of drones there is simply no trace on a radar screen.
We’re sure that some large players in the world of defence radar are queueing up to offer multi-million-dollar systems to airports worldwide, panicked into big spending by the Gatwick story, but idle hackerspace chat on the matter makes us ask the question: Just how difficult would it be to detect a drone in flight over an airport? A quick Google search reveals multiple products purporting to be drone detectors, but wouldn’t airports such as Gatwick already be using them if they were any good? The Hackaday readership never fail to impress us with their ingenuity, so how would you do it?
Can You Hear What You Can’t See?
It’s easy to pose that question as a Hackaday scribe, so to get the ball rolling here’s my first thought on how I’d do it. I always hear a multirotor and look up to see it, so I’d take the approach of listening for the distinctive sound of multirotor propellers. Could the auditory signature of high-RPM brushless motors be detected amidst the roar of sound near airports?
I’m imagining a network of Rasberry Pi boards each with a microphone attached, doing some real-time audio spectrum analysis to spot the likely frequency signature of the drone. Of course it’s easy to just say that as a hardware person with a background in the publishing business, so would a software specialist take that tack too? Or would you go for a radar approach, or perhaps even an infra-red one? Could you sense the heat signature of a multirotor, as their parts become quite hot in flight?
Whatever you think might work as a drone detection system, give it a spin in the comments. We’d suggest that people have the confidence to build something, and maybe even enter it in the Hackaday Prize when the time comes around. Come on, what have you got to lose!
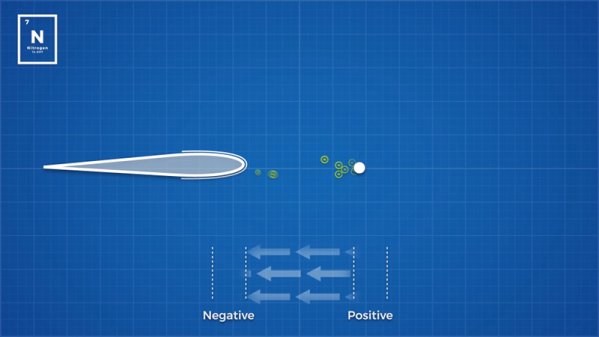
Not that we don’t love Star Trek, but the writers could never decide if ion propulsion was super high tech (Spock’s Brain) or something they used every day (The Menagerie). Regardless, ion propulsion is real and we have it today on more than one spacecraft. However, MIT recently demonstrated an ion-powered airplane. How exciting! An airplane with no moving parts that runs on electricity. Air travel will change forever, right? According to [Real Engineering], ion-propelled (full-sized) aircraft run into problems with the laws of physics. You can see the video explaining that, below.
To understand why, you need to know two things: how ion drive works and how the engines differ when using them in an atmosphere. Let’s start with a space-based ion engine, a topic we’ve covered before. Atoms are turned into ions which are accelerated electrically. So the ion engine is just using electricity to create thrust exhaust instead of burning rocket fuel.
[GlytchTech] decided to implement his own Digital Data Link (DDL) for his drone experiments, and by using a Raspberry Pi Zero and some open-source software, he succeeded in creating a mostly self-contained system that delivers HD video and telemetry using an Android phone as a display.
USB tethered Android phone used as a display and touch interface.
The link uses standard WiFi hardware in a slightly unusual way to create a digital data link that acts more like an analog system, with a preference for delivering low latency video and a graceful drop-off when signal quality gets poor. A Raspberry Pi Zero, Alfa NEH WiFi card, external antenna, battery, and a 3D printed enclosure result in a self-contained unit. Two are needed: one for each end of the link. One unit goes on the drone and interfaces to the flight controller, and the other is for the ground station.
A companion android app allows for just about any old Android phone to serve as video feed, on-screen display of telemetry data, and touchscreen interface.
The software is DroneBridge (GitHub repository) and it implements Wifibroadcast which uses WiFi radios, but without the usual WiFi functionality. A Raspberry Pi is the usual platform, but there’s also an ESP32 port. The software is capable of even more, but so far suits [GlytchTech]’s needs just fine, and he was able to refine his original Watch_Dogs-inspired hacking drone with it.
Picture this: it’s late in the evening on a freezing cold, dark, and windy December night in southern England, and an airport worker at Gatwick — London’s second international airport — sees something fly past in the gloom above the floodlights. The weather and darkness makes it difficult to see what the object was, but the report is phoned in to security. What was it? A flock of birds? A piece of plastic litter caught by the wind and blown through the night? In this case, the call is recorded as a drone. Because the magic D-word has been uttered, a security plan swings into action, the airport is put on a high state of readiness, and flights are suspended.
Gatwick by night, on an evening far less inclement than last week. News Oresund [CC BY 2.0].Thousands of people across the site are put on alert, watching for the drone. And of course, the drone reports roll in, and the story takes on a life of its own. People who have no idea what a drone looks like in the air are now expecting to see one, so of course when a flock of birds or a plastic bag caught by the wind crosses their peripheral vision they too are convinced that it is the drone. Night turns into day, there is a lull in the reports so the airport re-opens, only to be closed again following a fresh spate of sightings. Flights are diverted all across the country, and tens of thousands of passengers are stranded in the terminals.
No, it’s not a speck of dirt on your screen, it’s a drone! BBC (Fair use)
There follows three days of airport closure drama. No photos emerge despite almost every one of the many thousands of people on the site having a camera phone from which they are Tweeting about the queues in the terminal. There is a grainy video, but it is indistinct, and crucially it doesn’t have anything in it that is identifiable as Gatwick. Meanwhile the police are frustrated in their search for the drone operators, who like their drone, prove difficult to pinpoint
During the third night a pair of arrests are announced, a local couple. The police have saved the day, the culprits are under lock and key. Everyone breathes a sigh of relief, the airport re-opens, and that’s the end of that. Except of course it isn’t, because inconveniently the pair are found to be blameless and released. When pressed during an interview, a police spokesman then makes the embarrassing admission that there is a possibility that there may never have been a drone at all.
You Couldn’t Make It Up
If these are the drone parts they’ve found, they’re doing it wrong. Francis Wood [CC BY-SA 3.0]You might imagine that this was the fictional plot of a thriller novel, but sadly not. All of the above is a tale of the last few days of events in the British news, save for most of the first paragraph which is our guess at how the first drone sightings may have happened. At the time of writing there remains the possibility that there could have been a drone over Gatwick, but given the current dearth of evidence it is one that seems tenuous. There are reports of drone wreckage, but since readers with long memories will recall UK police once identified RepRap parts as a 3D printed gun we’ll wait until we see it before we call it that.
If there was indeed a drone then of course we would like to see its operators brought to justice forthwith. But what concerns us at Hackaday are the implications the episode could still have for those of our community with an interest in multirotors. The usual clamour was made for Government to do something about it, and we know that would have meant a fresh set of onerous regulations for responsible multirotor owners while doing nothing about the criminals, because of course criminals have little regard for laws.
So if we are to glean anything from this sorry mess, we must examine it from several angles. Why is there a lack of drone detection technology in place? How should drone reports initially be treated and investigated on the ground? How should they be dealt with in official inquiries, and how then should lawmakers see them? This will inevitably have a British flavour to it because of the incident in question, but the points are just as valid worldwide.
When a Drone Report Comes In, We Need a Reliable Way to Evaluate It
An oft-shared drone identification guide for airline pilots, of uncertain provenance (phantompilots.com).
When we are told something new, it passes a process of evaluation in our minds. We look at the source, and weigh up the story itself. If a guy with crazy hair in the street tells us that the aliens have landed and are controlling the Prime Minister with a ray gun, it will probably be discounted. But if Hackaday tells us that someone has hacked a VGA chipset to work as a software-defined radio we’re guessing most of you would be very interested indeed.
When a fresh drone incident is reported it appears that this evaluation process has historically been defective. We have previously discussed official incident reports that come with no physical evidence of a drone, but contain descriptions of drones with capabilities unmatched even by jet fighter aircraft. It seems like any eyewitness report in which the culprit is named as a drone is automatically taken at face value no matter how unlikely it may be. The fact that a report may have come from a pilot is sometimes mentioned as a boost to its credibility, but that is a false assumption. A pilot who is not familiar with either how drones appear from a distance or what the capabilities of a drone are in the air can only be considered an unreliable witness, because while they may know a lot about aircraft they lack the required expertise for this judgement. So what can be done to help boost the quality of reporting and to immediately highlight credible reports while requiring more for dubious ones?
In the case of a near miss in open airspace there may be little effect on ground-based facilities, but at an airport such as Gatwick there can be no chances taken by the authorities. A drone collision on an aircraft on final approach could cause hundreds of fatalities, so upon receipt of a report they must have had little choice but to close the runways. There appears to have been a lack of drone detection technologies in place at Gatwick which means that the only source available to the airport would have been the eyewitnesses themselves, and since we have amply demonstrated the potential for eyewitness reports being unreliable then the current confusion becomes an inevitability. It is imperative that more reliable detection technologies be fitted or developed if necessary. This is especially true when precautionary shut-downs stretch past minutes or hours into world-news-making delays as happened in this instance.
Competent Police Investigations and Responsible Journalism on Drone Reports
The mass media tech story cycle. Our apologies to Gartner. Curve image: Jeremykemp [ CC BY-SA 3.0 ]Once an incident has started and news of it emerges there is a consequent effect upon members of our community. Legitimate drone fliers away from the airport will find themselves under more scrutiny, and since it is already a common tale to hear of police being called when flying is under way that means they could face harassment and wrongful arrest. Indeed though we do not know all the details of the pair arrested near Gatwick it smacks of their being arrested in a round-up of convenient local drone enthusiasts rather than as a result of meaningful investigation. That the names of the pair were leaked and they became the subject of a media frenzy further shows the danger in which they were placed, as well as the irresponsibility of the reporters who covered their plight.
Perhaps Most Importantly: We Need Accurate Official Incident Reports
Whatever happens in a drone report, whether it be an arrest or an embarrassing debacle, there will inevitably be an official incident report from the Civil Aviation Authority, the regulator of British civilian airspace. This will form the official record of the event, and thus should strive to be as accurate as possible, but here the process falls short for the final time. There appears to be no evaluation step performed on the available evidence and no requirement for physical proof. So if an eyewitness reports behaviors about the drone that no drone ever built could possibly be capable of, it is solemnly recorded as fact. Our previous article on this subject highlights multiple such accounts, and this is an important point because as the official record these reports are what informs legislators. When they make laws pertaining to drones it is imperative that their decisions are based upon accurate evidence, and it is clear that this is not the case. Given that they will no doubt be reviewing drone legislation in the wake of this fiasco it is particularly important that the investigators consult people with specialist knowledge in the field, demand physical proof rather than heresay, and most importantly question accounts that stretch credibility.
It seems obvious that the multirotor hobbyist is caught in a perfect storm of incompetent authorities, deeply flawed investigations, shoddy journalism, and clueless legislators. This incident has laid bare some of the shortcomings, and it is to be hoped that a few lessons might be learned to produce less of a debacle surrounding future drone incidents. It is still a developing story so there may be a breakthrough and the whole narrative will change, and if that turns out to be the case then we hope they find the correct perpetrator this time and send them away at Her Majesty’s pleasure for a very long time. We’re guessing though that every effort will be made to push it as far under the carpet as possible to save red faces among officialdom. As multirotor enthusiasts we must keep the issue of poor investigation alive though, for if we let it be buried once more it will come back to trouble us again.




![Not much use against a small and mostly plastic multirotor. Sixflashphoto [CC BY-SA 4.0]](https://hackaday.com/wp-content/uploads/2018/12/788px-KCMH_Radar.jpg)


![Gatwick by night, on an evening far less inclement than last week. News Oresund [CC BY 2.0].](https://hackaday.com/wp-content/uploads/2018/12/Gatwick_Norwegian_2015mar27_0007_16333812524.jpg)

![If these are the drone parts they've found, they're doing it wrong. Francis Wood [CC BY-SA 3.0]](https://hackaday.com/wp-content/uploads/2018/12/1280px-Dunn_Chanter__Drones_Chantry.jpg?w=400)
![The mass media tech story cycle. Our apologies to Gartner. Curve image: Jeremykemp [ CC BY-SA 3.0 ]](https://hackaday.com/wp-content/uploads/2016/04/media-tech-cycle-800px1.png)









