Flickering LED tea lights are a friendly and safe alternative to having flaming little pots of wax situated around your home, but sometimes the flicker scheme leaves something to be desired.
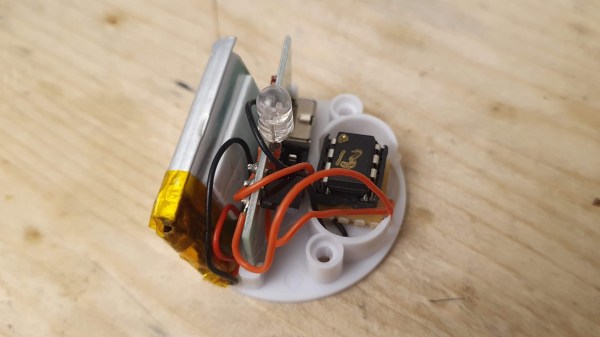
[Roger Rabbit] found a set of six such rechargeable tea lights with a base and a remote, and replaced the controller with an ATtiny85 for a more realistic flicker. When [Roger] opened up one of the candles, they found an IR sensor for the remote, a driver chip, and of course, an LED. No surprises there.
After desoldering the original controller, [Roger] wired in a socketed ATtiny85 on a piece of perfboard and hooked everything back up.The coolest part of this hack might just be the fact that there’s a perfect little compartment for the new microcontroller. How about that?
The Arduino code for this project is available in the Git repository, and the wonderful instruction manual is available in PDF form. Be sure to check out the brief video after the break.
You like these flickering LED candles? Here’s one you can blow out.