A camera slider is an accessory that can really make a shot. But when your business is photography rather than building camera accessories, quick-and-dirty solutions often have to suffice. Thus the genesis of this camera slider controller.
The photographer in question in [Paulo Renato], and while his passion may be photography, he seems to have a flair for motorized dollies and sliders. This controller is a variable-speed, reversible, PIC-based design that drives an eBay gearmotor. The circuit lives on a scrap of perfboard, and it along with batteries and a buck converter are stuffed into the case-modded remains of an old KVM switch. Push buttons salvaged from another bit of e-waste act as limit switches, and a little code provides the magic. We like the hacked nature of the controller, but we wonder about the wisdom of using the former KVM’s USB ports to connect the controller to the drivetrain; it’s all fun and games until you plug a real USB device into it. In sum, though, a nice build with nice results. Check out his other videos for more on the mechanicals.
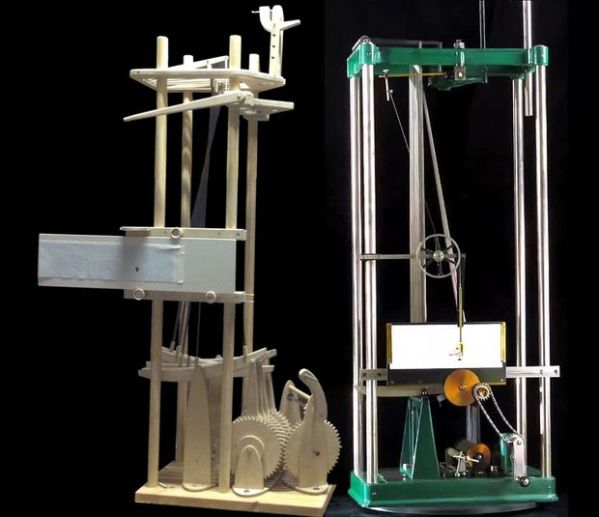
Camera slider rigs aplenty have graced our pages, including one made mostly of wood and one controlled by a fancy iPad app.
Continue reading “Camera Slider Helps Get The Shots With E-Waste Controller”