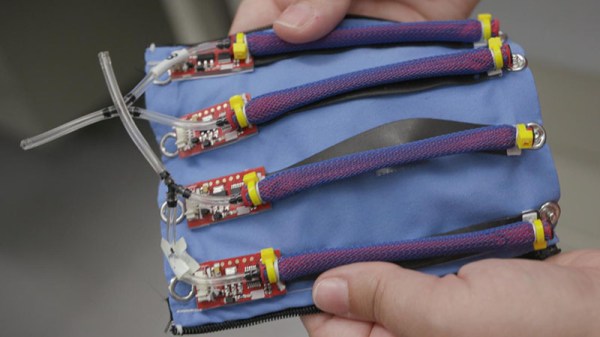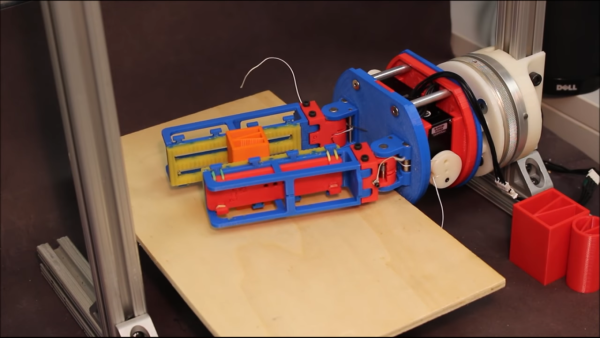
Unless you are in the fields of robotics or prosthetics, you likely take for granted the fine motor skills our hands have. Picking up and using a pen is no small feat for a robot which doesn’t have a dedicated pen-grabbing apparatus. Holding a mobile phone with the same gripper is equally daunting, not to mention moving that phone around once it has been grasped. Part of the wonder of our hands is the shape and texture which allows pens and phones to slide around at one moment, and hold fast the next moment. Yale’s Grab Lab has built a gripper which starts to solve that problem by changing the friction of the manipulators.
A spring-loaded set of slats with a low-friction surface allow a held object to move freely, but when more pressure is exerted by the robot, the slats retract and a high-friction surface contacts the object. This is similar to our fingers with their round surfaces. When we brush our hands over something lightly, they graze the surface but when we hold tight, our soft flesh meets the surface of the object and we can hold tightly. The Grab Lab is doing a great job demonstrating the solution and taking steps to more capable robots. All hail Skynet.
We have no shortage of gripper designs to choose from, including pneumatic silicone and one that conforms to an object’s surface, similar to our hands.
Continue reading “Greasing Robot Hands: Variable Friction Makes Robo-Mitts More Like Our Own”