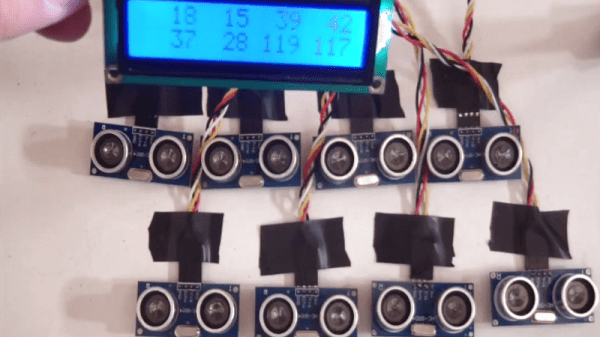
The HC-SR04 sonar modules are available for a mere pittance and, with some coaxing, can do a pretty decent job of helping your robot measure the distance to the nearest wall. But when sellers on eBay are shipping these things in ten-packs, why would you stop at mounting just one or two on your ‘bot? Octosonar is a hardware and Arduino software library that’ll get you up and running with up to eight sonar sensors in short order.
Octosonar uses an I2C multiplexer to send the “start” trigger pulses, and an eight-way OR gate to return the “echo” signal back to the host microcontroller. The software library then sends the I2C command to select and trigger a sonar module, and a couple of interrupt routines watch the “echo” line to figure out the time of flight, and thus the distance.
Having two sonars on each side of a rectangular robot allows it move parallel to a wall in a straightforward fashion: steer toward or away from the wall until they match. Watch the video below for a demo of this very simple setup. (But also note where the robot’s 45-degree blind spot is: bump-bump-bump!)


 One robot might not do much but the idea behind the Zooids is the introduction of swarm user interfaces, a new class of human-computer interfaces that involves multiple autonomous robots to handle both display and interaction. In a joint work between the Shape Lab at Stanford University (USA) and the Aviz team at Inria (France), researchers developed an
One robot might not do much but the idea behind the Zooids is the introduction of swarm user interfaces, a new class of human-computer interfaces that involves multiple autonomous robots to handle both display and interaction. In a joint work between the Shape Lab at Stanford University (USA) and the Aviz team at Inria (France), researchers developed an