A lot of the projects we feature here on Hackaday engender the classic “build versus buy” argument. We’ve always been puzzled by that; if anyone can appreciate the sheer joy of making something rather than buying it, it should be our readers. But there’s something to be said for buying the stuff you can buy and concentrating your effort on the bespoke aspects of the project. It’s perhaps not as exciting, but needs must, oftentimes.
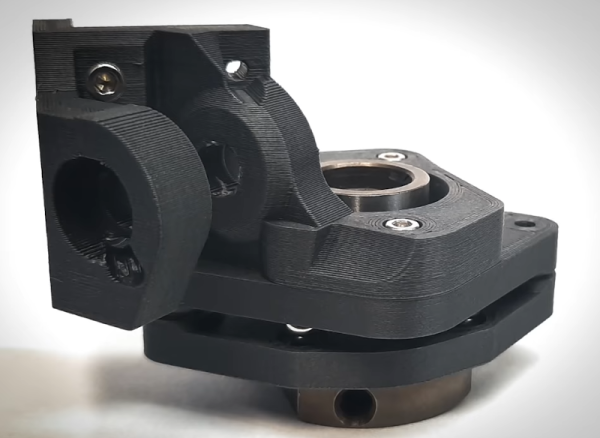
Let’s not forget there’s a third way though, which [Andy] explores with this ball nut modification project. Keen-eyed readers will recall [Andy]’s recent scratch-built ball screw build, in service of some top-secret, hush-hush project related to world domination and total subjugation of humanity. His homebrew efforts in this regard were a great lesson in how to machine a complex mechanism to work in a constrained space. Still, it left folks wondering why he’d go to all the trouble when he could have just trimmed an off-the-shelf part down to size. So, he decided to give that a try.
Continue reading “Ball Nut Modification Charts A Middle Course Between Building And Buying”