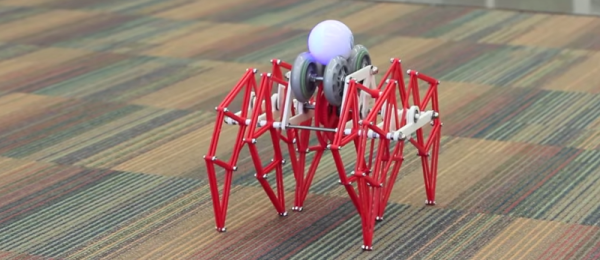
[Theo Jansen] makes awesome things called Strandbeests; wind-driven automatons that roam beaches and art galleries. It has long been one of our favorite mechanisms. Newer, but also a favorite is the Sphero smartphone controlled orb. The combination of the two is epic!
You may remember seeing Sphero used to create a tiny BB8 replica. Inside the orb is a tiny robot capable of rolling itself hamster-wheel-style in any direction. It’s a rather powerful bot and that makes Sphero fast. The high RPM is what makes this hack possible. Sphero spins rapidly while perched on some rollerblade wheels. Gearing converts this to the rolling motion of the Strandbeest.


The original concept was posted a year ago but it was just now brought to our attention by [fhareide] who is working on his own smaller Strandbeest driven by a Sphero. Since there are no assembly details on the original posting, you can follow along with [fhareide’s] documentation in order to complete your own build. So far [fhareide] imported the STL model into Autodesk Inventor, printed out one set of gears to insure the printer resolution could handle it, and assembled one set of legs.
We think of this as a kind of exoskeleton for a Sphero. We’ll keep an eye on this through the assembly, testing the drive mechanism and then the point where the whole thing becomes self-aware and either runs away to hide or terminates him.
Continue reading “Sphero Riding Strandbeest Is A Robot With An Exoskeleton”

 In 2013,
In 2013, 














