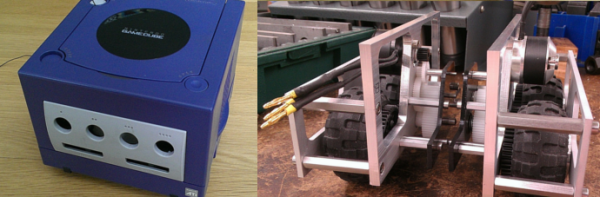
[Joshua] had his old Gamecube kicking around. Rather than let it gather dust, he took it into the machine shop at Harvey Mudd College and used its body as the shell of a mobile robot. With a bit of thought, it turns out that you can fit quite a lot inside the rather small Gamecube case. [Joshua] started with a couple of R/C plane style brushless outrunner motors. These motors generally give more torque and spin slower than their inrunner counterparts. Several thousand RPM was still too fast to directly drive the LEGO tires though. He needed a gear reduction.
Gears and tight spaces usually send people running for the SDP/SI website. We’ve used SDP/SI parts before, and have found that they make incredibly accurate gears and assemblies. Things can get pricey, however, when you’re buying two of everything. In search of a solution a bit more within his college-student-budget, [Joshua] looked at radio control servos. R/C servos have some rather strong output gears, especially the metal gear variety. Even with strong gears, parts do break in crashes, so replacement gear sets are available and cheap. [Joshua] settled on gears made for Hitec servos. His next problem was finding a pinion gear for his motors. That turned out to be easy, as 64 pitch gears commonly used in RC cars mesh with metric servo gears. The final results are great. His robot has tons of torque and plenty of speed to zip around. The only thing it’s missing is a brain. Videos after the break.
Continue reading “Gamecube Robot Is More Than Meets The Eye”