Think you need a microcontroller or a proper motor driver to control a motor? Not really. Because RS-232 serial ports are a hack in and of themselves, you can control two motors with only a serial port and a bridge driver.
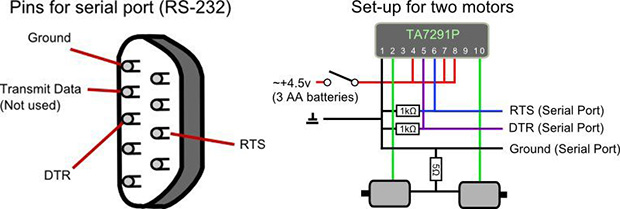
Instead of using the data pins on the serial port, this circuit works on with the DTR and RTS control signals of an RS-232 interface. Unlike the data lines of a serial port, these control signals are high when they’re enabled and can also provide a small amount of current – enough to control a pair of pins on a TA7291P bridge driver.
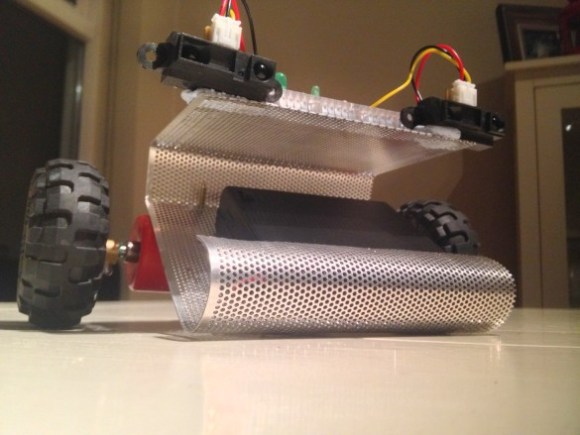
The rest of the circuit consists of a few resistors and a pair of motors, and the software simply turns the DTR and RTS lines on and off. It’s enough for a small robot to waddle across a table, and given the correct driver is simple enough to mash together out of parts from a junk drawer.