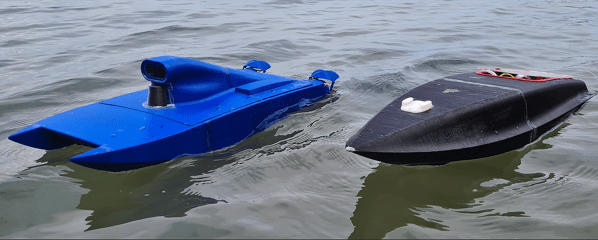
Combat robots come in all shapes and sizes, with regulating authorities often using weight limits to create a level playing field for competitors. [Hans Jørgen Grimstad] is building a robot to compete in a 4 kg class, and made some interesting design decisions to that end.
4 kg is not a lot of weight to play with. When considering the motors needed to propel the robot and the batteries needed to run everything, there’s then precious little weight left for weapons systems and armor plating.
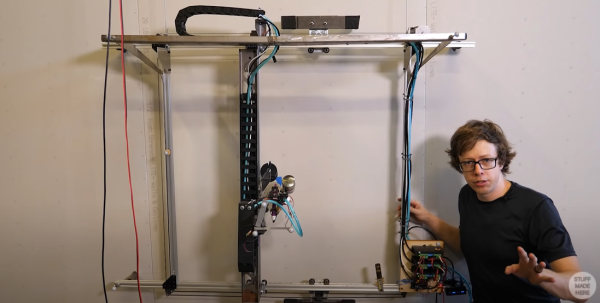
Thus, in an effort to make the most of the weight limitations, [Hans] decided to use carbon fiber for the robot’s outer shell. The method used is a simple wet layup in a mold. We’d be supremely interested to see how this armor holds up in competition, versus more typical choices like aluminium and steel.
Other interesting features include a belt-driven saw, which [Hans] tests with his hands mere inches away and the robot’s motors powered up. Don’t do this if you value your fingers. This is paired with a high-voltage discharge taser module. When the saw gets close to another robot, it may cause sparks to jump to the enemy, damaging its electronics in the process. It’s something we haven’t seen too often, as such measures are actually banned in some contests.
Diehard enthusiasts in the battle robot community will likely have fierce opinions on many points of the design; have it out in the comments. It’s certainly not the first carbon-fiber bot, but it’s nice to see the fancy material being thrown in the ring.
We’ve seen other designers innovate, too, such as this remarkably successful walking robot build. Video after the break.
Continue reading “Battle Robot Uses Carbon Fiber To Save Weight”