The convenience of just plugging in your car in the evening and not going into a gas station is great as long as you remember to do the plugging. You really don’t want to get caught with an empty battery while you’re in a rush. [Pat Larson]’s Tesla plugging robot might be a handy insurance policy if you count forgetfulness among your weaknesses.
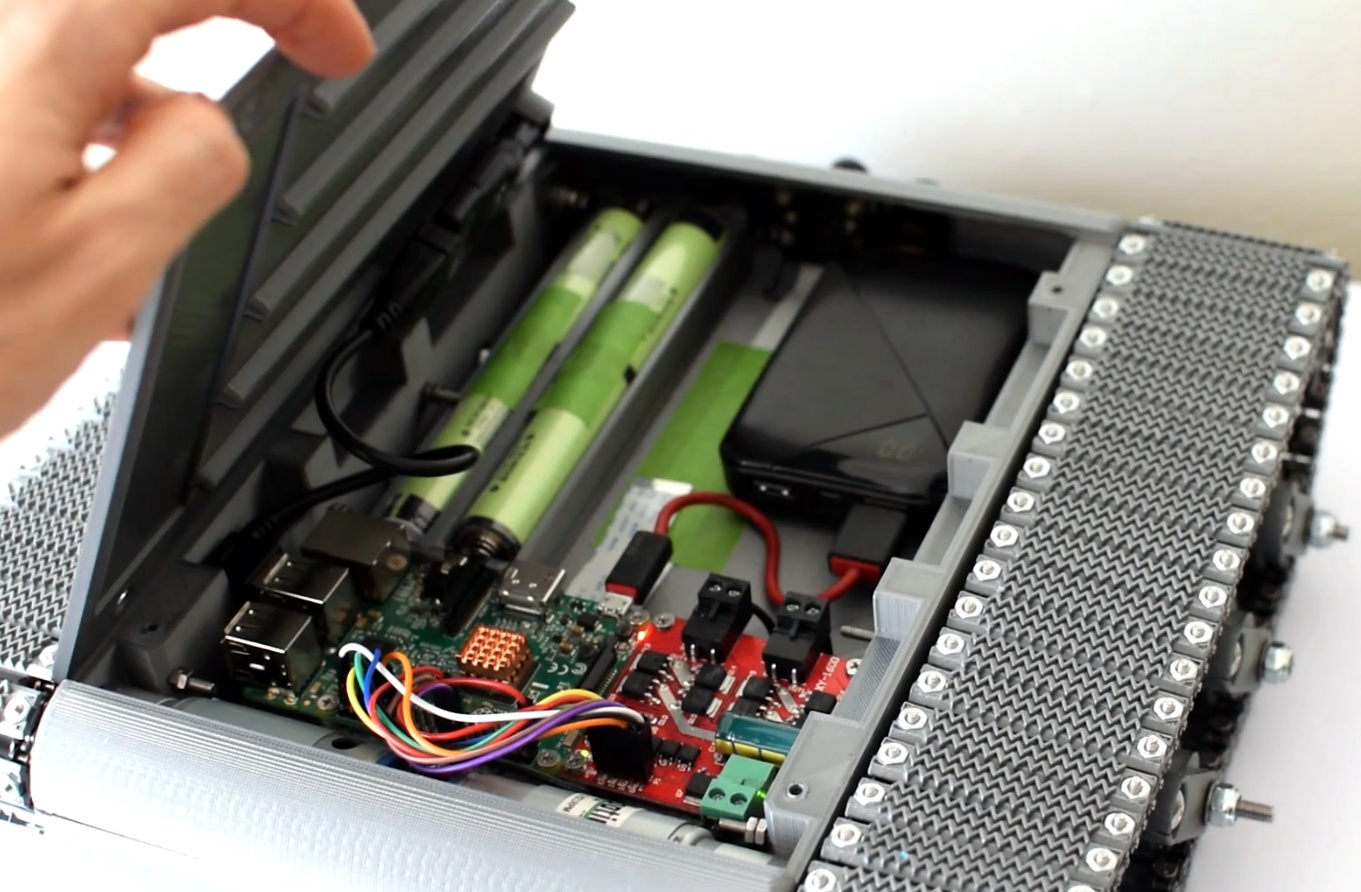
The robot consists of a standard Tesla charging plug attached to a 2-axis robotic arm mounted on [Pat]’s garage wall. Everything is controlled by a Python script running on Raspberry Pi 4. After taking a picture with a camera module, it uses a Tensor Flow Lite machine learning model to determine the position of a reflector on the charging port cover. The platform moves back and forth to align with the charging port, after which it opens the charging port using the Tesla API. It then extends the arm towards the charging port, using ultrasonic proximity sensors for distance control, and again uses the camera module and Tensor Flow to look for the illuminated Tesla logo adjacent to the charging port. The charge plug is flipped out using a large servo, and after some final position adjustment, it takes the plunge. While robot won’t be winning any interior design contests, it does the job well, and adds a bit of convenience and peace of mind.
Other Tesla hacks we’ve seen include building a working Model S for $6500, turning an old Honda into a speed demon using Tesla parts, and a Casio F-91W that can unlock your Tesla.