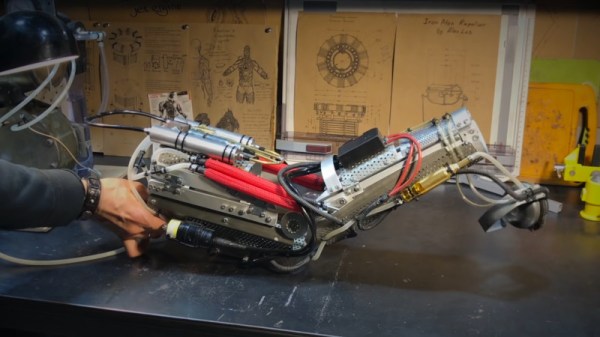
The idea of building a suit that increases the wearer’s strength is a compelling one, often featured in science fiction. There are a handful of real world examples, and [Alex] can now add his to the list. The build comes with a twist however, relying on hydrogen to do the work.
At its heart, the build is not dissimilar to other artificial muscle projects. The muscles in [Alex’s] build consist of a rubber tube inside a nylon braid. When the rubber tube is inflated, it expands, causing the nylon braid to shorten as it grows wider. Commonly, such builds rely on compressed air to power the muscles, however [Alex] took a different path. Instead, water is electrolysed in a chamber designed to look like Iron Man’s arc reactor, with the resulting gases produced being used to drive the muscles. With five muscles ganged up to pull together, the wearable arm support is capable of generating up to 15 kg of pull force.
It’s a design that has a few benefits; the electrolyser has no moving parts, and is much simpler and quieter than a typical air compressor. Obviously, there is a risk of fire thanks to the flammable gases used, but [Alex] explains the precautions taken to minimise this risk in the video.
Exosuits may not be mainstream just yet, but that doesn’t mean people aren’t working to make them a reality. We’ve featured a few before, like this open-source design. Video after the break.