Transcutaneous Electrical Nerve Stimulation (TENS) is one of those things that sounds like it must be woo when you first hear of it. “A trickle of current that can deal with chronic pain better than the pills we’ve been using for decades? Yeah, and what chakras do you hook this doo-hickie up to?” It seems too good to be true, but in fact it’s a well-supported therapy that has become part of scientific medicine. There are no crystals needed, and you’re applying electrodes to the effected area, not your chakras. Like all medical devices, it can be expensive if you have to buy the machine out-of-pocket… but it is just a trickle of current. [Leon Hillmann] shows us its well within the range of hackability, so why not DIY?
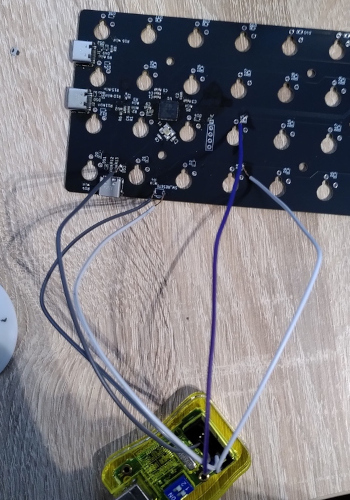
[Leon]’s TENS machine is specifically designed to help a relative with hand problems, so breaks out electrodes for each finger, with one on the palm serving as a common ground. This type of TENS is “monophasic”– that is, DC, which is easier than balancing current flowing in two directions through quivering flesh. The direct current is provided at 32 V to the digit electrodes, safely kept to a constant amperage with a transistor-based current limiting circuit. The common ground in the palm is pulsed at a rate set by an ATmega32U4 and thus controllable: 14 Hz is given as an example.
Obviously if you want to reproduce this work you’re doing it at your own risk and need to consult with relevant medical professionals (blah blah blah, caveat gluteus maximus) but this particular sort of medical device is a good fit for the average hacker. Aside from prosthetics, we haven’t seen that much serious medical hacking since the pandemic. Still, like with synthesizing medical drugs, this is the kind of thing you probably don’t want to vibe code.