Yet another custom X Box controller has come out of the acidmods foundry. This one, specialized for FPS games opts for two analog sticks up front, and complete removal of the D pad and buttons. They break down the process quite nicely with very detailed pictures of how to modify the case and move the analog stick. Check out the video of it in action after the break.
[Ben Heckendorn]’s Access Controller is now shipping. The controller is designed to be used with just one hand. It has six openings that the five control modules can be placed in. It’s easy to reconfigure depending on the player or game. While the prototype was built using Xbox 360 controller parts, this newly released unit is available for the PS2, PS3, and PCs. The Xbox 360 version is still being reviewed for final production. [Ben] says that in the coming weeks he’ll post a how-to for building your own modules. There’s always one empty slot and the bus like design should make this fairly simple.
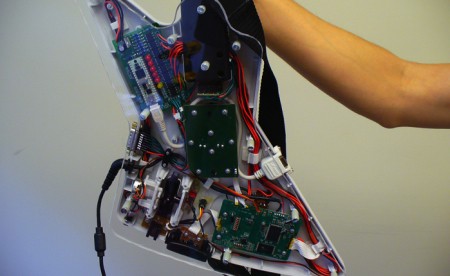
Reader [HotDog-Cart] is an active member of the benheck forums and recently completed this Playstation 3 boomerang controller. The boomerang was originally shown with the Playstation 3 prototype and was severely panned by the press. [Josh] started with a cheap 3rd party controller that was approximately boomerang shaped. He enlarged the controller body ~20% using bondo. The internals were replaced with gear from an official Sony controller. It was finished with a coat of black paint. It’s definitely a nice build and the new internals mean it probably feels as good as any factory controller.
A team of five high school seniors have released some videos of their new Guitar Hero bot named DeepNote. This bot uses a group of custom photodiode modules with an 8 nanosecond latency placed on the screen to sense the notes. The Parallax Propeller system takes this input and controls solid state relays hooked into the guitar’s circuitry. After we looked at a few videos of the early prototype system, we could really see how it has evolved. They have custom PCBs and a really nice frame for the photodiode sensors. You can find more info on their How It Works page and view a demo video embedded below.
[youtube=http://www.youtube.com/watch?v=C1WOoPV_7HU&hl=en&fs=1&rel=0&color1=0x3a3a3a&color2=0x999999] [Jeff] has been playing around with Parallax’s Propeller chip. He’s used it to adapt an NES controller to the to the Commodore 64. In this latest iteration though, he’s added a Memsic 2125 dual axis accelerometer to the end of a whiffle ball bat and used that to provide Wii style controller input. The video above shows his son playing Street Sports Baseball with it.
[F00 f00] of Acidmods was not satisfied with his first-person shooter gaming experience, so he modded an Xbox 360 controller so that A, B, X and Y buttons are on the underside of the controller, on the inside edges of the wings where the player’s fingertips usually go. He also moved the right thumbstick up a bit so that it would be level with the left one. He designed it to improve his ability to play first person shooters, but the advantages go beyond one genre of game. The right thumb is free to remain on the right thumbstick, and the colored buttons can be pressed by four fingers instead of just the right thumb. We love this mod for it’s simplicity and effectiveness, and we’re eagerly awaiting the internal photos he promised.
More Wii Fit Balance Board hacks keep rolling in from Europe. We’re not sure we agree with [Juan Gonzales]’s assertion that the Wii Fit Balance board is the best way to control robots, but we can’t deny how fun it looks. [Gonzales] managed to control a robot of his own design with the balance board, making it turn when he leans to the sides and moving forward and back when he leans in those directions.
The robot, which he calls SkyBot, is fairly impressive in its own right, built from a PIC microcontroller and featuring various infrared sensors and 6 contact sensors. The robot’s OS can be controlled from Windows, OS X, or Linux, but for this project, they used Debian. The balance board interfaces with a laptop connected to SkyBot; custom software (tar.gz file) to make this work was written in python, and is available on [Gonzales]’s robot wiki, as well as instructions on how to build a SkyBot. It is in Spanish, however, so fire up Google Translate and get to work.